Курсовая работа: Разработка электропривода прошивного стана трубопрокатного агрегата
Полная эквивалентная приведенная кинематическая схема изображена на рисунке 1.3
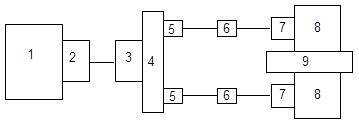
Рисунок 1.3− Полная эквивалентная приведенная кинематическая схема установки
На рисунке обозначены:
1− момент инерции ротора двигателя;
2,3,5,6− момент инерции полумуфты;
4− момент инерции редуктора;
7− момент инерции шпинделя;
8− момент инерции рабочего валка;
9− момент инерции заготовки.
Для расчета приведенных моментов инерции и жесткостей к скорости вала электродвигателя используем следующие формулы:
![]() ;
;
![]() ;
;
где![]() − момент инерции
− момент инерции ![]() −го элемента;
−го элемента;
![]() − приведенный момент инерции
− приведенный момент инерции ![]() −го элемента;
−го элемента;
![]() − жесткость
− жесткость ![]() −го элемента;
−го элемента;
![]() − приведенная жесткость
− приведенная жесткость ![]() −го элемента;
−го элемента;
![]() − передаточное отношение для
− передаточное отношение для ![]() −го элемента.
−го элемента.
![]() − инерционность двигателя пока неизвестна.
− инерционность двигателя пока неизвестна. ![]() ;
;
![]() кг*м2 − момент инерции полумуфты.
кг*м2 − момент инерции полумуфты. ![]() кг*м2 ;
кг*м2 ;
![]() кг*м2 − момент инерции второй полумуфты.
кг*м2 − момент инерции второй полумуфты. ![]() кг*м2 ;
кг*м2 ;
![]() − момент инерции редуктора.
− момент инерции редуктора. ![]() , т.к исходя из условия задания момент инерции прочих элементов кинематической схемы составляет 20% от момента инерции двигателя;
, т.к исходя из условия задания момент инерции прочих элементов кинематической схемы составляет 20% от момента инерции двигателя;
![]() кг*м2 − момент инерции полумуфты.
кг*м2 − момент инерции полумуфты. ![]() кг*м2 ;
кг*м2 ;
![]() кг*м2 − момент инерции полумуфты.
кг*м2 − момент инерции полумуфты. ![]() кг*м2 ;
кг*м2 ;
![]() кг*м2 − момент инерции шпинделя.
кг*м2 − момент инерции шпинделя. ![]() кг*м2 ;
кг*м2 ;
Масса одного валка может быть определена по формуле:
![]() ,
,
где![]() м− радиус валка по бочке;
м− радиус валка по бочке;
![]() м− высота половины валка (усеченного конуса);
м− высота половины валка (усеченного конуса);