Курсовая работа: Разработка математической модели теплообменника смешения
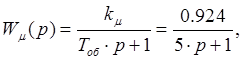
по каналу ![]()
 (2.5)
(2.5)
3. Получение математической модели объекта в виде переменных пространство состояний
Одной из распространенных форм математического описания линейных динамических систем являются уравнения следующего вида:
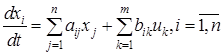 ;
; 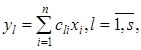 (3.1)
(3.1)
Это название связано с тем, что при uk = 0 достаточно задать начальное значение переменных xi , чтобы однозначно определить состояние системы xi (t), y1 для любого момента времени. Модель (3.1) содержит n дифференциальных уравнений 1-го порядка с k управляющими входными воздействиями, а также s алгебраических соотношений для связи выходных переменных системы y с переменными состояния x. Коэффициенты aij , bik , cli называют параметрами модели.
Уравнения (3.1) удобно представить в матричной форме
![]() (3.2)
(3.2)
где X - вектор переменных состояния; U − вектор управляющих (входных) воздействий; Y - вектор выходов; A, B, C − матрицы параметров [2].
Модель (3.2), в сравнении с ранее рассмотренными моделями, формирует дополнительно n переменных внутреннего состояния системы, что увеличивает количество информации об объекте управления.
При этом начальные условия согласуют следующим образом:
 (3.7)
(3.7)
Структурная схема объекта с учетом полученных передаточных функций:
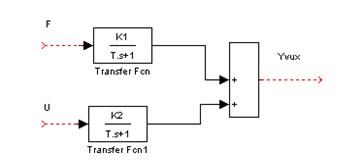
Рисунок 3.1-Структурная схема объекта
Тогда вектор переменных состояния объекта в отклонениях от желаемых базовых значений примет вид:
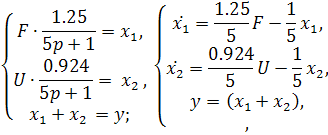
На основе полученных дифференциальных уравнений запишем матрицы А, B и S.
4. Получение дискретной математической модели объекта
Термин “дискретный” еще не сложился. Каждая система управления, в которой присутствует хотя бы один элемент, который не подчиняется непрерывному характеру изменения сигнала, может быть отнесен к классу дискретных систем. Для этих систем характерным является исчезновения сигнала информации хотя бы на небольшом интервале времени. Если эти интервалы устремить к нулю, то можно рассматривать систему как непрерывную. Дискретные системы более общие. В производстве часто технологические процессы непрерывные [2].
Пусть имеется на входе в дискретный элемент какой-то непрерывный сигнал. Введем период квантования. Заменяем реальное время на кванты т=к*Т к=0,1,…,![]() . Если Т
. Если Т![]() 0 тогда имеем непрерывную модель. В этом случае можно зафиксировать амплитуды. Кроме квантования по времени можно квантовать и по вертикали (амплитуде). При таком виде квантования цифры заносятся в виде “0” и “1”. В случае объединения этих квантований они называются дискретными.
0 тогда имеем непрерывную модель. В этом случае можно зафиксировать амплитуды. Кроме квантования по времени можно квантовать и по вертикали (амплитуде). При таком виде квантования цифры заносятся в виде “0” и “1”. В случае объединения этих квантований они называются дискретными.
Выделим случай, когда входной сигнал x(t) является элементарной функцией 1(t). Реакцию системы на воздействие 1(t) можно компактно:
 , (5.1)
, (5.1)
где W(D) называется операторной передаточной функцией или оператором. Формально W(D) можно рассматривать как дробно-рациональную функцию от оператора:
 . (5.2)
. (5.2)
Воспользуемся преобразованием Лапласа, основываясь на утверждении
![]() , (5.3)
, (5.3)
если f(0) = 0. Аналогично можно записать:
![]()
![]() (5.4)
(5.4)
![]() (5.5)
(5.5)