Курсовая работа: Разработка регулируемого электропривода механизма с заданным рабочим циклом Требования к
Необходимая полезная средняя мощность двигателя:

Вт.С учётом потерь в элементах кинематической цепи
![]() Вт.
Вт.
Исходя из этих условий выбираем систему ![]() . Основные технико-экономические свойства этой системы приведены в табл. 2. (стоимость приведена в условных единицах). Для реверсивных устройств стоимость практически удваивается.
. Основные технико-экономические свойства этой системы приведены в табл. 2. (стоимость приведена в условных единицах). Для реверсивных устройств стоимость практически удваивается.
Таблица 2 Удельная стоимость электрооборудования, усл.ед./кВт
| Наименование | |
| 1200 | |
| 1800 |
3. Выбор передаточного устройства
Передаточное устройство привода преобразует вращательное движение электродвигателя во вращающееся или поступательное движение исполнительного органа. В современных приводах существует тенденция упрощения передаточного устройства путем исключения промежуточных звеньев в виде редукторов или других механизмов. При этом заметно возрастает точность, быстродействие и надежность привода. Однако для безредукторных приводов часто требуются специальные низкоскоростные двигатели, выпуск которых отечественной промышленностью явно отстает от потребностей современного электропривода. Кроме того, низкоскоростные электродвигатели уступают высокоскоростным по массогабаритным и энергетическим показателям.
Для приводов подачи станков в качестве передаточного устройства обычно используют передачу винт-гайка качения. Преимуществами передач винт-гайка качения является: 1) возможность полного устранения зазора в резьбе и создания натяга, обеспечивающего высокую осевую жесткость, 2) низкие потери на трение; к. п. д. этих передач достигает 0.95, 3) почти полная независимость силы трения от скорости и очень малое трение покоя, что обеспечивает равномерность движения.
Для упрощения передаточного устройства выберем шаг резьбы винта так, чтобы дополнительного редуктора не требовалось, для этого сопоставим номинальную скорость двигателя максимальной скорости рабочего органа:

КПД муфт принимаю равным 0,98.
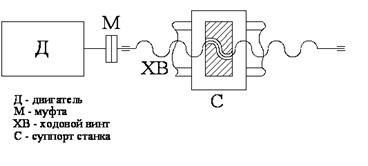
Рис. 1. Кинематическая схема электропривода.
Основным параметром при расчёте передачи винт-гайка качения является рабочая часть ходового винта:
![]() м;
м;
Определяем параметры винта, при условии ![]() :
:
![]() м;
м;
![]() м;
м;
![]() (однозаходный винт)
(однозаходный винт)
Шаг винта сверяем со стандартным рядом, учитывая рекомендации:
![]() мм.
мм.
Исходя из параметров винта определяем параметры передачи винт-гайка качения с натягом :
![]() мм;
мм;
![]() мм;
мм;
![]()
![]()
К.П.Д. винтовой передачи по:
![]()