Курсовая работа: Разработка следящей системы
Коэффициент передачи по возмущающему воздействию равен нулю, тогда приведенное выше выражение преобразуется в следующее:
![]() ,
,
а это есть уравнение прямой линии, параллельной оси Х.
Таким образом, при любом возмущающем воздействии система будет поддерживать выходную координату на заданном уровне.
2. Исследование САР в переходных режимах
2.1 Составление структурно-алгоритмической модели без учета нелинейности характеристик элементов
При составлении структурно-алгоритмической модели в структурной схеме отдельно выделяются интегрирующие звенья. На входе интегратора будет производная переменной, а на выходе само значение.
Среди всех звеньев структурной схемы выделим типовые звенья: пропорциональное, интегральное, и апериодическое. Рассмотрим преобразование типового звена в структурно-алгоритмическую форму.
Апериодическое звено.

 |
Таким образом, структурно-алгоритмическая форма апериодического звена имеет вид:
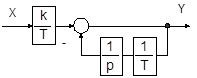
Дифференциальное звено.
При составлении структурно-алгоритмической формы необходимо, чтобы числитель передаточной функции имел степень не больше знаменателя. Поэтому при моделировании дифференциального звена используют фильтр с малой постоянной времени, на порядок меньше, чем Тm .
![]()
Структурно-алгоритмическая форма имеет вид:
Пропорциональное, интегральное и пропорционально-интегральное.
Структурно-алгоритмическая форма этих звенев не отличатся от обычной структурной формы. Пропорционально-интегральное звено является комбинацией пропорционального и интегрального звеньев.
2.2 Расчет переходных характеристик по контурам
Контур скорости.
Схема модели представлена в приложении Б. По результатам моделирования, делаем вывод, что перерегулирование составляет 43%, время регулирования—16Тm .
Контур положения.
Схема модели представлена в приложении Б. По результатам моделирования делаем вывод, что перерегулирование составляет 21%, а время регулирования—40Тm .
2.3 Составление структурно-алоритмической модели с учетом нелинейностей характеристик элементов
В данном курсовом проекте согласно заданию задана нелинейность датчика тока типа «зона нечувствительности». Но в схеме нет датчика тока. Поэтому, посчитав это недочетом задания, взята нелинейность датчика скорости.
До некоторого значения входного сигнала, выходной сигнал датчика равен нулю, а далее изменяется линейно.
2.4 Расчет переходных характеристик, оценка показателей качества
Из-за того, что контур скорости имеет большое перерегулирование, то сигнал задания скорости нужно подавать через апериодическое звено. Если же этого не делать, то в переходном процессе контура положения видны колебания.
Из-за нелинейности датчика скорости в системе возникают незатухающие колебания, которые убрать невозможно, т.к. при выходе на номинальное положение скорость двигателя должна быть равна нулю, а контролировать это невозможно.
2.5 Моделирование режимов работы САР в соответствии с индивидуальным заданием
Режим работы САР следующий: через задатчик интенсивности задается угол поворота. Время выхода на номинальный режим—2 с. В момент времени 3,5 с. к системе прикладывается момент сопротивления равный номинальному моменту.
Полная модель САР и графики переходных процессов представлены в приложении Б. По результатам моделирования можно сделать выводы:
- В системе присутствуют незатухающие колебания. Уменьшить их амплитуду можно только уменьшением зоны нечувствительности датчика скорости.
- Момент сопротивления оказывает на систему незначительное влияние только при набросе, на статику он не влияет. Для того, чтобы это было лучше заметно приведен график без нелинейности датчика скорости. На графике с учетом нелинейности датчика на фоне автоколебаний наброс нагрузки вообще не просматривается.
2.6 Определение параметров автоколебаний
Для определения параметров автоколебаний необходимо привести систему к виду:
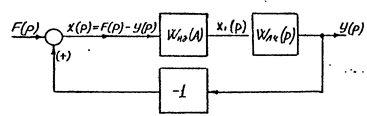
Для нахождения параметров автоколебаний необходимо построить АФХ линейной и нелинейной части. Точка пересечения даст параметры автоколебаний.
АФХ нелинейной части.
«Зона нечувствительности» датчика скорости представляет собой нелинейность, симметричную относительно начала координат. Поэтому комплексный коэффициент усиления не будет содержать мнимой части. АФХ будет проходить по действительной оси от минус бесконечности до минус единицы.
АФХ линейной части.
Для нахождения передаточной функции преобразуем схему: