Курсовая работа: Разработка следящей системы
- Всё, что не охвачено этими связями—отбрасываем.
- Находим передаточную функцию линейной части.
В итоге получим:
![]()

Для нахождения АФХ нужно «р» заменить на jw.
Выделим действительную и мнимую часть.
Для построения АФХ воспользуемся программой MathCAD:
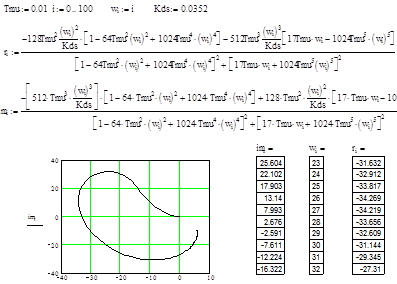
Видно, что АФХ линейной части пересекает ось Х на интервале [минус бесконечность; -1]. Значит в системе есть автоколебания. Приблизительная частота—28,5 рад/с. При этом вещественная часть по модулю равна «33». Такое же значение имеет вещественная часть АФХ нелинейного элемента (т.к. в точке пересечения они равны).
Комплексный коэффициент усиления нелинейного элемента не содержит мнимой части и имеет вид:
Из этого уравнения выражаем А=0,5.
Заключение
В результате проделанной работы была спроектирована двухконтурная система управления положением.
При моделировании рабочего режима были получены следующие результаты:
перерегулирование — 3% (без учета автоколебаний, амплитуда которых для данного режима — 8,3%);
время выхода на номинальный режим—1,95 секунды;
система работает с астатизмом первого порядка, т.е. при постоянного момента сопротивления положение рабочего органа равно заданному углу поворота.
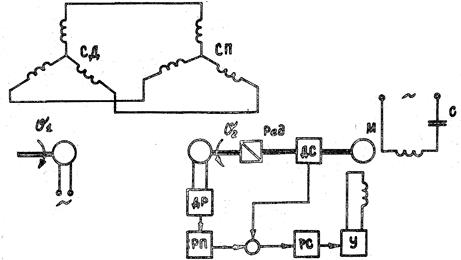
 Приложение А—Функциональная и структурная схемы электропривода
Приложение А—Функциональная и структурная схемы электропривода
Структурная схема электропривода:

Функциональная схема:
Приложение Б — Листинги программ, таблицы результатов и графики
Модели
Исходные данные для моделей:
|
Pnom=2200; Ianom=12.2; c=1.27; К-во Просмотров: 746
Бесплатно скачать Курсовая работа: Разработка следящей системы
|