Курсовая работа: Розробка лінійних систем автоматичного управління (САУ) з цифровою корегуючою ланкою
2.1 Розробка функціональної схеми
В слідкуючій системі, яка проектується, в якості виконавчого двигуна (Д) використовується двигун постійного струму серії МІ, в якості підсилювача потужності - електромашинний підсилювач з поперечним полем (ЕМП). Для вимірювального пристрою (ВП) рекомендується використовувати сельсинну пару: сельсин-датчик і сельсин-трансформатор (приймач). Оскільки вимірювальний пристрій працює на змінному струмі, а підсилювач потужності і виконавчий двигун - на постійному струмі, то після вимірювального пристрою повинний бути застосований фазовий детектор (ФД). Крім зазначених елементів у функціональну схему входять: корегувальний пристрій (КП), підсилювач напруги (П), редуктор (Р), за допомогою якого виконавчий двигун з'єднується з об'єктом управління і ротором сельсина-трансформатора, та об'єкт управління (ОУ).
????????????? ????? ???????? ?????????? ???????, ???????? ?? ???.1. ???.1. ????????????? ????? ???????? ?????????? ???????
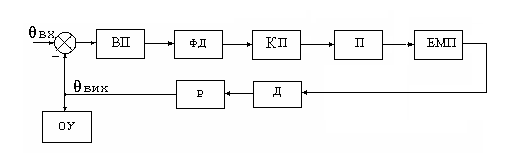
Рис.1. Функціональна схема слідкуючої системи
слідкуюча цифрова корегуюча ланка
2.2 Вибір виконавчого двигуна
Вибір двигуна починають з розрахунку необхідної потужності, що повинна бути достатньої для забезпечення заданої швидкості і прискорення об'єкта управління при заданому навантаженні.
Необхідна потужність, Вт:
![]() ,
,
де р ККД редуктора, р = 0,72 .
З каталогу (додаток 2) вибираємо найближчий двигун більшої потужності Рн > Ртр і виписуємо його паспортні дані:
Рн - номінальна потужність (Вт);
nн - номінальна швидкість обертання (об/хв);
Uн - номінальна напруга (В);
Iн - номінальний струм якоря (А);
Rд - опір ланцюга обмотки якоря (Ом);
Jд - момент інерції якоря (кг.м2 );
д - ККД двигуна.
Потім послідовно визначаємо такі величини:
номінальна кутова швидкість двигуна н (с-1 ) -
н = nн /30 ;
номінальний момент двигуна Мн (Н.м) -
Мн = 9,55Рн /nн ;
оптимальне передаточне число редуктора iр -
![]() ,
,
де Jр = 1.10-4 кг.м2 - момент інерції редуктора.
Визначаємо необхідний момент на валу двигуна:
 .
.
Для обраного двигуна необхідно перевірити вимогу чи задовольняє він моменту і швидкості у відповідності до таких умов: