Курсовая работа: Розробка лінійних систем автоматичного управління (САУ) з цифровою корегуючою ланкою
Для визначення передаточної функції бажаної системи можна скористатися програмою, що наведена в додатку 4. Програма написана мовою BASIC і дозволяє знайти постійні часу T1, Т2, Т3 бажаної передаточної функції по показниках якості smах і tp. При цьому передаточна функція записується у виді
![]() . (2)
. (2)
Типова бажана ЛАЧХ, по якій записана передаточна функція (2), показана на рис. 4.
Показник ступеня k визначається нахилом заданої ЛАЧХ в області високих частот.
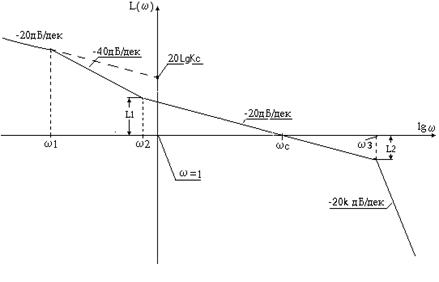
Рис 4. Типова ЛАЧХ бажаної слідкуючої системи
Для забезпечення заданих показників якості перехідного процесу скорегована система повинна мати визначений запас стійкості по фазі. Необхідна величина запасу сталості по фазі (q) для заданої величини максимального перерегулювання зазначена в табл.1. Після побудови бажаної ЛАЧХ потрібно розрахувати і побудувати ЛФЧХ зкорегованої системи і визначити q .
2.5.3 Розрахунок послідовної корегуючої ланки
ЛАЧХ послідовного безперервної корегуючої ланки будується шляхом графічного вирахування з ЛАЧХ бажаної ЛАЧХ заданої частини системи ( на рис.3 - лінія с-с-с).
По виду ЛАЧХ потрібно записати передаточну функцію безперервної послідовної корегуючої ланки. Для ЛАЧХ с-с-с на рис.3 передаточна функція має вид:-
 . (2)
. (2)
Коефіцієнт Ккор визначається зі співвідношення: 20lgКкор =L3 .
Цю ж передаточну функцію можна одержати, якщо бажану передаточну функцію КБ (Р) поділити на передаточну функцію заданої частини системи Кз (Р).
2.6 Моделювання слідкуючої системи з безперервною послідовною корегуючою ланкою
Для того щоб переконатися, що корекція системи проведена правильно і скорегована система має показники якості перехідного процесу не гірше заданих, потрібно провести моделювання. Рекомендується моделювати скореговану систему на ПЕОМ, використовуючи пакет Matlab simulink.
Якщо виявиться, що показники якості скорегованої системи гірше заданих, то потрібно вносити в корекцію відповідні зміни. Так, якщо перерегулювання виявилося більше заданого, то потрібно збільшувати відрізки L1 і L2. Якщо час регулювання виявилося більше заданого, потрібно збільшувати частоту зрізу бажаної ЛАЧХ.
Література
1. Бесекерский В.А., Попов Е.П. Теория систем автоматического регулирования. М.: Наука, 2001. 766 с.
2. Батоврин А.А., Дашевский П.Г. и др. Цифровые следящие системы судовой автоматики. Л.: Судостроение, 1999. 445 с.
Додаток 1
Варіанти вихідних даних для проектування слідкуючої системи
| Вариант |
Статичний момент навантаження Мос, Нм |
Момент інерції об'єкта управління Jо, кгм2 |
Максим. кутова швидкість о max, с-1 |
Максим. кутове прискорення о max, с-2 |
К-во Просмотров: 315
Бесплатно скачать Курсовая работа: Розробка лінійних систем автоматичного управління (САУ) з цифровою корегуючою ланкою
| ||||