Курсовая работа: Розробка лінійних систем автоматичного управління (САУ) з цифровою корегуючою ланкою
Jc - сумарний момент інерції, приведений до вала двигуна
![]()
![]() ;
;
2.4.2 Електромашинний підсилювач (ЕМП)
Передаточна функція ЕМП
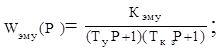
КЕМП - коефіцієнт підсилення ЕМП по напрузі
![]()
![]()
де UЕМП - напруга на виході ЕМП ;
![]() - напруга обмотки управління ЕМП ;
- напруга обмотки управління ЕМП ;
Ру , Rу - відповідно потужність і опір обмотки управління ЕМП,
Ту, Ткз - постійні часу обмотки управління і короткозамкненої обмотки
якоря ЕМП.
2.4.3 Підсилювач
Підсилювач (на функціональній схемі - П) слугує для узгодження вихідного сигналу ЦАП із вхідним опором обмотки управління ЕМП. Його можна вважати безінерційною ланкою з передаточною функцією Wп (Р) = Кп .
У розрахунках прийняти Кп =1 .
2.4.4 Фазовий детектор
Передаточна функція фазового детектора Wфд (P) = Кфд ,
де Кфд =1 - коефіцієнт підсилення фазового детектора.
2.4.5 Вимірювальний пристрій
Передаточна функція вимірювального пристрою Wвп (Р)=Квп ,
де Квп =1 - коефіцієнт підсилення вимірювального пристрою.
2.4.6 Редуктор
Передаточна функція редуктора Wред (Р)=Кред =1/iр .
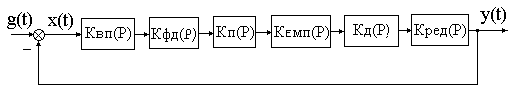 |
?????????? ????? ?????????????? ?????????? ???????, ???????? ?? ???.2.
Рис.2. Структурна схема незкорегованої слідкуючої системи
2.5 Розрахунок послідовної безперервної корегуючої ланки методом ЛАЧХ
Побудова логарифмічної амплітудно-частотної характеристики (ЛАЧХ) послідовної корегуючої ланки проводиться в такій послідовності.
1. Будується ЛАЧХ заданої (незкорегованої) системи.
2. Будується бажана ЛАЧХ за заданими показниками якості перехідного процесу.