Курсовая работа: Розробка лінійних систем автоматичного управління (САУ) з цифровою корегуючою ланкою
4. По виду ЛАЧХ корегуючої ланки визначається його передаточна функція (безперервна).
2.5.1 Побудова ЛАЧХ заданої системи по виду передаточної функції
Передаточну функцію розімкненої системи потрібно представити у виді добутку передаточних функцій типових динамічних ланок (обмежимося випадком, коли в системі відсутні коливальні ланки і ланки із запізненням). Наприклад, нехай передаточна функція розімкненої системи має вид:
![]() .
.
Побудову зручно проводити в такій послідовності.
1. Визначити частоти, при яких відбувається зміна нахилу ЛАЧХ і які розраховуються як wi =1/Тi , та відкласти їх по вісі абсцис у логарифмічному масштабі (Тi - постійні часу передаточної функції Кз (Р) ).
2. Відкласти точку A1 з координатами wA1 =1c-1 і L(wA1 )=20lgКз ( див. рис. 3). Через точку A1 провести пряму з нахилом-20 дБ/дек. Побудована в такий спосіб пряма лінія збігається з ЛАЧХ при частотах, менших першої зупрягаючої частоти (один по одному їхнього розташування на вісі частот ліворуч-праворуч).
3. На частоті сполучення wi характеристика змінює свій нахил: або на +20 дБ/дек, якщо постійна часу Тi= 1/ wi знаходиться в чисельнику вихідної передаточної функції, або на -20 дБ/дек, якщо постійна часу Тi знаходиться в знаменнику передаточної функції.
Для дослідження системи на стійкість за амплітудно-фазовим критерієм стійкості за допомогою логарифмічних частотних характеристик, необхідно крім ЛАЧХ побудувати ще логарифмічну фазочастотну характеристику (ЛФЧХ). По вісі абсцис відкладається частота в логарифмічному масштабі (використовують ту ж вісь частот, що і для побудови ЛАЧХ), а по вісі ординат відкладають аргумент амплітудно-фазової характеристики j(w) чи у градусах чи у радіанах в лінійному масштабі. Для розглянутого приклада j(w) розраховується по формулі
j(w)= - 90 - arctg Tу w - arctg Tкз w - arctg Tд w [град.].
2.5.2 Побудова бажаної ЛАЧХ
При побудові бажаної ЛАЧХ виділяють три області: область низьких частот, область середніх частот і область високих частот. Вид ЛАЧХ у кожній з областей по різному впливає на якість системи. В області низьких частот вид ЛАЧХ визначає точність роботи системи в сталих режимах. Область середніх частот визначає динамічні властивості системи (швидкодія, коливальність). Вид ЛАЧХ в області високих частот практично мало впливає на якість системи.
Побудову бажаної ЛАЧХ зручно починати з області середніх частот у такій послідовності.
По заданих величинах smax і tр визначаємо за допомогою табл. 1 частоту зрізу wс.
Наприклад, нехай задано, що smax =30 % , tр =1,5 с. З табл.1 для smax =30% визначаємо tр wс /p=3,2, звідки випливає:
wс = 3,2p/1,5=6,7 c-1 .
Таблиця 1
| max , % | 10 | 15 | 20 | 25 | 30 | 35 | 40 |
| tр с / | 5 | 4,4 | 4 | 3,6 | 3,2 | 3 | 2,8 |
| L1 , дБ | 18 | 15 | 13,5 | 12 | 11 | 10,5 | 10 |
| , гр | 85 | 80 | 65 | 55 | 45 | 40 | 35 |
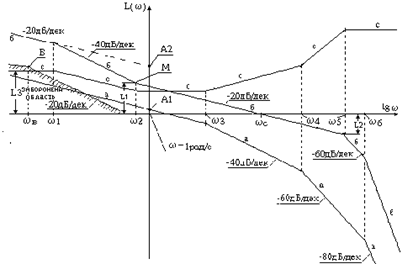 |
???.3. ?-?-? - ???? ??????? (????????? ???????) ???????;
б-б-б - ЛАЧХ бажана;
c-c-c - ЛАЧХ послідовної корегуючої ланки.
Наносимо на вісь абсцис частоту зрізу wс і проводимо через неї пряму лінію з нахилом -20 дБ/дек (рис.3).
Частота w2 , яка обмежує область середніх частот бажаної ЛАЧХ ліворуч, визначається величиною відрізка L1 , що може бути знайдена в залежності від заданої величини smax з табл.1. Частота w3 , яка обмежує область середніх частот праворуч, визначається величиною відрізка L2 , при цьому![]() .
.
В області високих частот бажану ЛАЧХ потрібно будувати у виді прямолінійних відрізків з нахилом, кратним -20 дБ/дек. (тобто -40, - 60, -80 і т.д.), таким чином, щоб різниця характеристик бажаної і заданої (у межі при w ® ¥) складала пряму лінію, рівнобіжну вісі частот.
В області низьких частот бажана ЛАЧХ будується в такий спосіб. По заданій величині коефіцієнта підсилення системи Кс =wо m ах /xmax визначаємо величину LA2 =20LgKc і відзначаємо на кресленні точку A2 c координатами wA2 =1 c-1 і LA2 (див. рис.3). Через точку A2 проводимо пряму лінію з нахилом -20 дБ/дек.
Від точки М, що обмежує область середніх частот ліворуч, проводимо пряму лінію з нахилом -40дБ/дек до перетинання з низькочастотною частиною бажаної ЛАЧХ.
Якщо в завданні на розробку слідкуючої системи, зазначена максимально припустима похибка спостереження Хмах за умови, що вхідний сигнал може змінюватися з максимальною кутовою і з максимальним кутовим прискоренням eomax , то для виконання цих вимог необхідно, щоб бажана ЛАЧХ не попадала у заборонену область.
Заборонена область будується в такий спосіб. Визначаємо на кресленні точку В з координатами:

 .
.
Від точки Bвправо проводимо пряму лінію з нахилом -40 дБ/дек, а вліво - пряму лінію з нахилом -20 дБ/дек.
Якщо ЛАЧХ, побудована по заданому коефіцієнту Кс, попадає в заборонену область, то це означає, що при даному коефіцієнті Кс задана точність спостереження не може бути забезпечена і коефіцієнт Кс потрібно збільшити, (бажану ЛАЧХ зрушувати вправо), щоб бажана ЛАЧХ не попадала в заборонену область.
По виду ЛАЧХ бажаної можна записати передаточну функцію безперервної зкорегованої (бажаної) системи. Для розглянутого приклада (крива б-б-б... рис.3) передаточна функція має вид: