Курсовая работа: Синтез закона управления и настройка промышленного регулятора для стабилизации температуры в условиях возмущений
Рисунок 2.8 – График переходного процесса для звена второго порядка, рассчитанного с помощью метода площадей
2.6 Построение математической модели звена второго порядка методом Ротача
Проведем в точке перегиба касательную, для определения интервала времени Т0 , заключенного между точками пересечения этой касательной оси абсцисс и линии установившегося значения h∞ переходной характеристики:
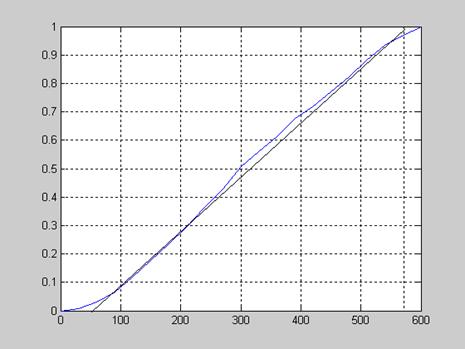
Рисунок 2.9 – Нормированный переходный процесс
Таким образом, запишем величины, являющиеся входными данными:
T0 =526 tп=90, y(tп)=0,09.
Введем обозначение: ![]()
Так как ![]() , то возможна аппроксимация инерционным звеном второго порядка без запаздывания (т.е. q=1, t=0), следовательно, получаем следующую модель:
, то возможна аппроксимация инерционным звеном второго порядка без запаздывания (т.е. q=1, t=0), следовательно, получаем следующую модель:
![]()
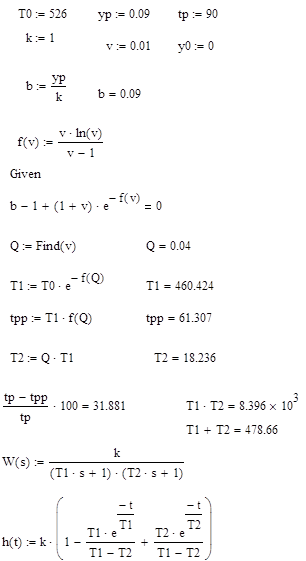
Таким образом, запишем модель звена второго порядка без запаздывания:
![]() или
или ![]()
Теперь построим переходный процесс для данной передаточной функции.
w=tf([514.3],[8396 478.66 1]);
step(w, 600)
grid on
Результат представлен на рисунке 2.10.
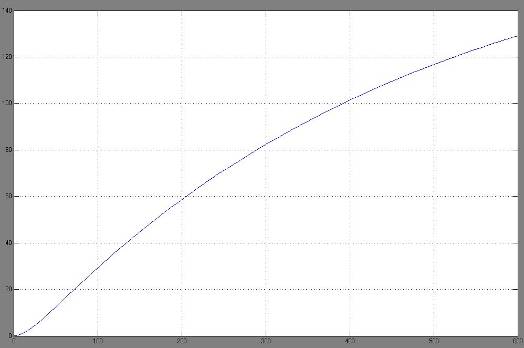
Рисунок 2.10 – График переходного процесса для звена второго порядка, рассчитанного методом Ротача
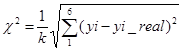
2.7 Выбор наилучшей аппроксимирующей модели
Для выбора лучшей аппроксимирующей модели объекта управления среди найденных моделей сравним теоретические и экспериментальный переходные процессы. Для оценки качества полученных передаточных функций, описывающих объект управления, вычислим оценку χ2 по формуле:
![]()
![]()
![]()
Проведенный расчет дает следующие результаты:
%Расчет погрешностей
k=514.3;
y_real=[24.44 60 93.33 125.5 154.44 180];
y1=[32 72 101 122 136 146];
y2=[31.1 73.3 106.67 131.11 148.89 160];
y3=[30 58.33 63.33 103.33 116.67 128.33];
tmp=0;