Курсовая работа: Синтез закона управления и настройка промышленного регулятора для стабилизации температуры в условиях возмущений
tmp = tmp + (y_real(i)-y1(i))^2;
end
x1=sqrt(tmp)/k
tmp=0;
for i=1:6
tmp = tmp + (y_real(i)-y2(i))^2;
end
x2=sqrt(tmp)/k
tmp=0;
for i=1:6
tmp = tmp + (y_real(i)-y3(i))^2;
end
x3=sqrt(tmp)/k
x1 =
0.0818
x2 =
0.0571
x3 =
0.1445
x1 – соответствует оценке звена запаздывания; x2 – соответствует апериодическому звену второго порядка, рассчитанному методом площадей; x3 – соответствует апериодическому звену второго порядка, рассчитанному методом Ротача.
Так как наименьшая оценка χ2 получилась у апериодического звена второго порядка, рассчитанного интегральным методом, то это звено и возьмем в качестве модели нашей системы. Передаточная функция объекта управления имеет вид:
![]()
3 СИНТЕЗ РЕГУЛЯТОРА
3.1 Синтез регулятора методом ЛАЧХ
Для того чтобы система удовлетворяла заданным требованиям по точности и качеству (перерегулирование s![]() 5 %, время регулирования tP
5 %, время регулирования tP ![]() 420 с, коэффициент статической ошибки С0 =0), необходимо в систему, структурная схема которой изображена на рисунке 3.1, ввести регулятор.
420 с, коэффициент статической ошибки С0 =0), необходимо в систему, структурная схема которой изображена на рисунке 3.1, ввести регулятор.
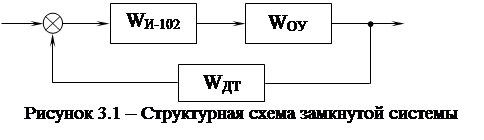 |
Преобразуем структурную схему, представленную на рисунке 3.1, введем в систему регулятор как корректирующее звено последовательного типа:

Рисунок 3. 2 – Структурная схема замкнутой системы с регулятором
Найдем передаточную функцию неизменяемой части прямой цепи:
![]()
гдеWДТ =kД – передаточная функция датчика температуры Тд;