Курсовая работа: Синтез закона управления и настройка промышленного регулятора для стабилизации температуры в условиях возмущений
WО – передаточная функция объекта управления.
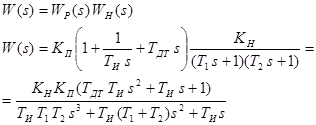
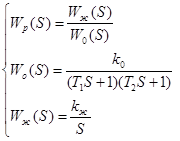
Передаточная функция прямой цепи (неизменяемой части системы):
![]()
Тогда коэффициент усиления неизменяемой части K:
![]()
Передаточная функция неизменяемой части прямой цепи будет иметь вид:
![]()
Передаточную функцию синтезируемого регулятора найдём методом логарифмических частотных характеристик. Для этого построим ЛАЧХ неизменяемой части прямой цепи исследуемой САУ:
![]()
Примем желаемую передаточную функцию в виде
![]() .
.
Желаемый коэффициент усиления определяется из соотношения:
![]() .
.
Kж=0,0186.
Передаточная функция регулятора:
![]()
Практически реализуемые регуляторы строятся с использованием следующих допущений и приближений: объект управления инерционен, и в цепях регулятора нет высокочастотных помех или они достаточно малы. Тогда высокочастотной частью регулятора можно пренебречь и считать, что T3 =0. При этом желаемая ЛАЧХ рассчитывается из требования T1 =T2 , при желаемой ЛАЧХ в общем виде:
![]() .
.
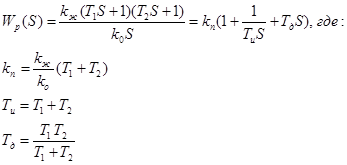
Для определения параметров регулятора воспользуемся следующими соотношениями:
Тогда передаточная функция регулятора будет иметь следующий вид:
С учетом параметров объекта и звеном чистого запаздывания передаточная функция регулятора окончательно примет вид:
![]() .
.
Полученный регулятор является ПИ-регулятором с запаздыванием.
3.2 Переходная характеристика замкнутой системы
Модель построения переходной характеристики представим системе MatLab в виде передаточной функции.
Передаточная функция прямой цепи: