Курсовая работа: Система автоматического регулирования напряжения сварочной дуги
Однако, необходимо отметить, что это предположение выполняется далеко не всегда.
2. Все функции от переменных, входящих в данное уравнение, не имеют разрывов и являются гладкими при номинальных значениях аргументов. Другими словами, предполагается, что для каждой функции существуют первые производные по всем аргументам в точке, соответствующей номинальному режиму. В противоположном случае, если хотя бы одна из функций, входящих в уравнения, имеет разрыв в точке номинального режима, либо не является гладкой в этой точке, то такое уравнение, а также сама функция называются существенно нелинейными. Линеаризация таких уравнений и функции невозможна.
Номинальные значения переменных обозначаются большими буквам с верхним нулевым индексом:
X(t)= X0 = const, U(t)= U0 = const ит.д
Отклонения переменных обозначаются соответствующими маленькими буквами:
x ( t )= X ( t ) – X 0 и т.д
Очевидно, что в номинальном режиме отклонения всех переменных в системе, а также производные отклонений по времени равны нулю.
Дифференциальное уравнение является линейным, если функция f 1 (…) и f 2 (…) в левой и правой частях являются линейными комбинациями переменных и их производных:

В частном случае, если функции f1 (...) и f2 (...) не содержат в качестве аргументов производных искомой функции и заданных функций, дифференциальное уравнение (1) превращается в обычную функцию определяющую зависимость переменной X(t) в какой-либо момент от мгновенных значений аргументов Y(t), ..., Z(t) в тот же момент:
![]() (3)
(3)
Такой вид математической модели означает, что моделируемый объект рассматривается как статический (безинерционный). САР напряжение сварочной дуги-это статическая система, так как всегда будет присутствовать ошибка регулируемого параметра, в силу нелинейной зависимости числа оборотов двигателя от величины магнитного потока возбуждающей компенсирующей обмотке 2.
Аналитическая запись линейной функции содержит только суммы аргументов, умноженных, быть может, на постоянные коэффициенты
![]()
Если функция имеет только один аргумент, то она может быть задана в виде графика. График линейной функции имеет вид прямой линии, проходящей через начало координат:
Заметим, что если график, имеющий вид прямой линии, не проходит через начало координат, то соответствующая ему функция не является линейной. Вернемся к системе уравнений САР напряжение сварочной дуги. Очевидно, что в этой системе линейными являются уравнения в пп. 2,4,6,8,11,12,14,15,16,18,19,20,21,22. К нелинейным относятся уравнения в пп. 1,3,5,7,9,10,13,17.
В общем случае линеаризация заключается в разложении функции в ряд Тейлора в окрестности номинальных значений аргументов и отбрасывании членов ряда, порядок которого выше первого.
При проведении линеаризации конкретной функции необходимо внимательно относится к номинальным значениям переменных, отмечая те из них, которые равны нулю в установившемся режиме работы данной САР. Если номинальные значения некоторых переменных равны нулю, то могут обратиться в нуль коэффициенты при отдельных аргументах в выражении линеаризованной функции. Такие аргументы необходимо отбросить.
Для тех дифференциальных уравнений и функций исходной модели САР, которые являются линейными, переход к отклонениям сводится к замене обозначений полных переменных на обозначения их отклонений.
Итак, линеаризованная система уравнений имеет вид:
1) Для линеаризации зависимости напряжения подаваемого на компенсационную обмотку генератора U1 от задающего напряжения Uз и перемещения ручки потенциометра Х, необходимо найти частные производные U1 по переменным Uз и Х в точках номинальрого режима
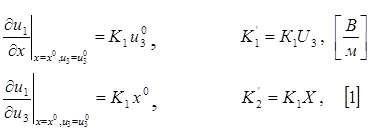
Линеаризированная зависимость примет вид:
![]()
2) 
3) Зависимость магнитного потока возбуждения Ф1 генератора от величины тока возбуждения I1 задана графически. Отметив на графике точку номинального режима и проведя касательную к графику в этой точке, получим линеаризованную зависимость магнитного потока от тока в отклонениях.
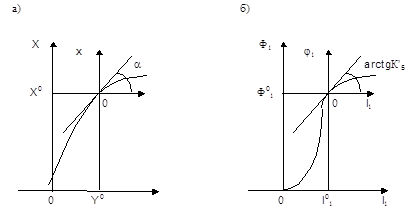
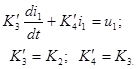
Тангенс угла наклона к оси i1 обозначим К5 . Линеаризованная зависимость примет вид