Курсовая работа: Система автоматического управления положением объекта
Если двигатель, имеющий запас по мощности, не удовлетворяет требованию по скорости, то, изменяя передаточное число редуктора, можно согласовать соотношение между требуемой и располагаемой мощностями. Новое передаточное отношение можно определить по выражению:

Примем для выполнения условия за оптимальное значение передаточного числа редуктора ![]() .
.
Проверим заново, выполняется ли условие при новом значении передаточного числа редуктора:
![]()
![]()
![]()
Данное условие выполняется.
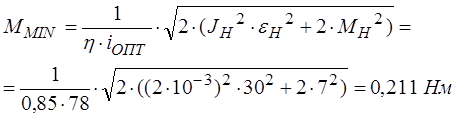
Найдем заново минимальное значение среднеквадратического вращающего момента двигателя:
Проверяем условие:
![]()
Амплитудное значение вращающего момента составит:
![]() ,
,
а номинальное значение вращающего момента электродвигателя:
![]() .
.
Как видно, при вновь рассчитанном передаточном числе редуктора, двигатель типа СЛ-521 полностью удовлетворяет предъявляемым требованиям, как по скорости вращения, так и по вращающему моменту.
Выберем число пар зацеплений n и передаточное число каждой пары редуктора по номограмме, представленной на рисунке 2.
Известно, что если ![]() , то n = 4:
, то n = 4: ![]() ;
; ![]() ;
; ![]() ;
; ![]() .
.
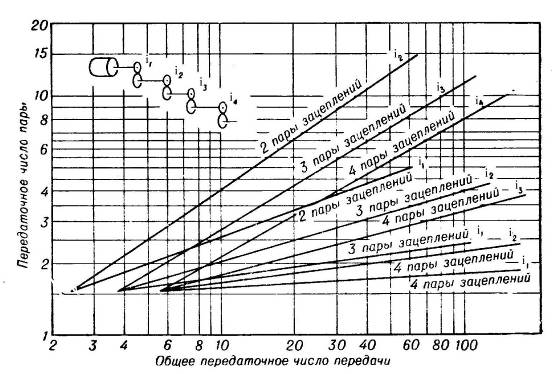
Рисунок 2 – Номограмма
Используя справочные данные двигателя (таблица 2), определим параметры электродвигателя, которые необходимы для составления его передаточной функции.
Пусковой ток якоря найдем следующим образом:
![]()
Полное сопротивление цепи якоря:
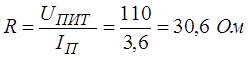 , где I П – пусковой ток якоря.
, где I П – пусковой ток якоря.
Постоянные электродвигателя CЕ =КЕ ·Ф и СМ =КМ ·Ф, где Ф – магнитный поток возбуждения, КМ и КЕ – конструктивные постоянные, в системе СИ принимают равные значения и рассчитываются по формуле:

Коэффициент передачи двигателя между установившейся частотой вращения двигателя и напряжением питания на этой частоте: