Курсовая работа: Система автоматического управления положением объекта
Выберем первый класс точности и подставим в (2):
![]() .
.
При малых углах рассогласования коэффициент преобразования схемы на сельсинах приблизительно равен:
![]() ,
,
где UМАХ – максимальное значение напряжения синхронизации сельсина-приёмника.
2.3 Определение коэффициента передачи разомкнутой системы
Коэффициент передачи разомкнутой системы К определяется из условия обеспечения заданной точности её функционирования. Коэффициент передачи разомкнутой системы связан с коэффициентами передачи отдельных устройств соотношением:
 , (3)
, (3)
где КУ – коэффициент усиления усилительного устройства.
В следящих системах, предназначенных для отработки угла поворота входной оси, погрешность следования Δα включает в себя погрешность покоя и динамическую погрешность. Погрешность покоя имеет место при остановке системы и включает в себя:
· моментную погрешность ΔαМ :
 , (4)
, (4)
зависящую от момента сопротивления на валу двигателя;
· погрешность ΔαЛ от люфта в зацеплениях силового редуктора, которая лежит в интервале (10´…20´);
· погрешность ΔαС =Δс, вызванная неточностью элемента сравнения;
· погрешность ΔαУ , вызванная неточностью усилителя, лежащая в интервале (5´…10´).
Принимаем: ![]()
![]()
![]()
Найдем коэффициент передачи разомкнутой системы, учитывая, что момент трения, используемый при расчете, складывается из момента, присущего элементу сравнения, и статического момента трения, которым обладает исполнительный двигатель:
![]()
![]() Нм
Нм
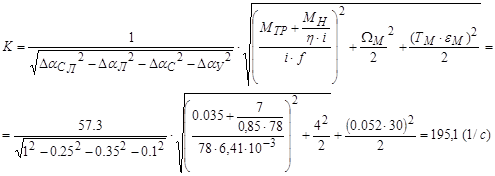
Результирующая погрешность следования подсчитывается по формуле:
![]() , (5)
, (5)
Моментная погрешность в соответствии с (4) сосавит:
 град
град
Определим скоростную погрешность и погрешность от ускорения:
 град
град