Курсовая работа: Система автоматического управления положением объекта
Коэффициент внутреннего демпфирования, отражающий уменьшение вращающего момента с ростом скорости вращения:
 .
.
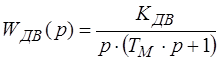
Электромеханическая постоянная времени с учётом нагрузки, которая характеризует быстроту протекания электромеханических переходных процессов в двигателе примет величину:

Электромагнитная постоянная времени составит:
![]()
Так как постоянная времени ТЭ много меньше постоянной времени ТМ , то ТЭ можно пренебречь.
Выходной величиной двигателя является угол поворота, следовательно его передаточная функция имеет вид:
 .
.
С учётом того, что постоянная времени ТЭ мала передаточная функция двигателя примет вид:
 ,
, 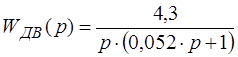 .
.
2.2 Выбор элемента сравнения
Элемент сравнения осуществляет сравнение заданного значения регулируемой величины с действительным значением. Помимо выделения сигнала рассогласования сравнивающий элемент выполняет функции преобразования входных сигналов к виду, удобному для дальнейшего применения в системе.
В качестве элементов сравнения были выбраны сельсины. Датчик рассогласования выполнен в виде одноканальной схемы на сельсинах, работающих в трансформаторном режиме. Схема элемента сравнения представлена на рисунке 3.
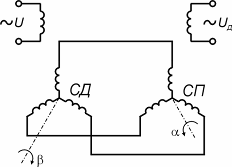
СД – сельсин-датчик,
СП – сельсин-приёмник.
Рисунок 3 – Схема элемента сравнения
Переменное напряжение питания U подаётся на статор сельсина-датчика, а напряжение рассогласования UД снимается с однофазной обмотки сельсина-приёмника.
![]() ,
,
где КС – коэффициент преобразования схемы по напряжению, которое снимается с однофазной обмотки статора сельсина-приёмника.
В согласованном положении роторов сельсина-датчика и сельсина-приёмника напряжение в однофазной обмотки статора сельсина-приёмника оказывается отличным от нуля. Величина угла, на который необходимо повернуть какой-либо из роторов, чтобы напряжение на выходе схемы стало равным нулю, называется статической ошибкой схемы измерения. В качестве ошибки схемы измерения принимают среднюю квадратичную погрешность двух сельсинов – СД и СП.
![]() , (2)
, (2)
где Δсд, Δсп – погрешности датчика и приёмника.
Технические данные сельсина-датчика и сельсина-приёмника приведены в таблице 4.
Таблица 4 – Данные сельсинов
| Тип сельсина | СД | СПТ |
| БД-160А | БС-155А | |
| Напряжение возбуждения, В | 110 | 100 |
| Частота напряжения возбуждения, Гц | 400 | 400 |
| Потребляемый ток, А | 0,3 | 0,15 |
| Максимальное напряжение синхронизации, В | 100 | 100 |
| Асимметрия нулевых положений ротора, угл.мин |
А кл.: + 2,5 Б кл.: + 5 0,1 кл.: + 10 К-во Просмотров: 508
Бесплатно скачать Курсовая работа: Система автоматического управления положением объекта
| |