Курсовая работа: Строительная механика
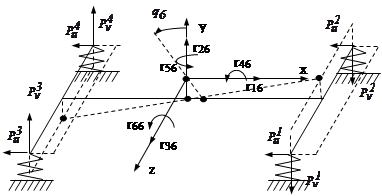
Рисунок 5.7 – Схема нагруженности от q6
1. Деформации: du =U2 -U1 =hc ×q6 -0=2,044(м); dv 1 =dv 2 =V2 -V1 =l1 ×q6 -0=5(м);
dv 3 =dv 4 =V2 -V1 =l3 ×q6 -0=5(м).
2. Силы упругости: Pu =Cu ×du =42,95×105 ×2,044=87,777×105 (Н);
Pv =Cv ×dv =4×106 ×5=2×107 (Н).
3. Реакции:
SX=0; r16 =4×Cu ×hc =4×42,95×105 ×2,044=351,1×105 (Н);
SY=0; r26 -Pv 1 -Pv 2 +Pv 3 +Pv 4 =0; r26 =0 (вагон симметричный);
SZ=0; r36 =0;
SMx =0; r46 +Pv 1 ×b1 -Pv 2 ×b2 -Pv 3 ×b3 +Pv 4 ×b4 = 0; r46 =0 (вагон симметричный)
SMy =0; r56 -Pu 1 ×b1 +Pu 2 ×b2 -Pu 3 ×b3 +Pu 4 ×b4 =0; r56 =0 (вагон симметричный);
SMz =0; r66 -Pu 1 ×hc * -Pu 2 ×hc * -Pu 3 ×hc * -Pu 4 ×hc * -Pv 1 ×l1 -Pv 2 ×l2 -Pv 3 ×l3 -Pv 4 ×l4 =0;
r66 =4×87,777×105 ×2,169+4×2×107 ×5=476,1×106 (Н×м).
5.3 Математическая модель виброзащитной системы вагона
На кузов вагона действует система реакций сил упругости, обусловленная колебаниями ![]() . Реакции в связях
. Реакции в связях ![]() по направлению координатных осей от
по направлению координатных осей от ![]() .суммируются, образуя в узле вектор реактивных усилий:
.суммируются, образуя в узле вектор реактивных усилий:
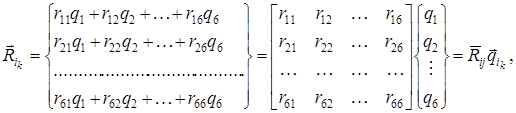 (5.12)
(5.12)
где ![]() – матрица коэффициентов жесткости несимметричного вагона:
– матрица коэффициентов жесткости несимметричного вагона:
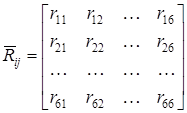 ,(5.13)
,(5.13)
![]() – вектор перемещений центра масс кузова вагона.
– вектор перемещений центра масс кузова вагона.
6 Внешняя нагруженность динамической системы
6.1 Физическая модель нагруженности вагона
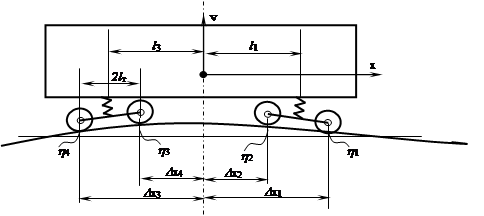
Рисунок 6. 1 - Схема для расчета перемещения колесных пар
Нагруженность характеризуется силами упругости в рессорном подвешивании ![]() и реакциями сил упругости в центрах масс тел
и реакциями сил упругости в центрах масс тел ![]() . Динамическая система получает гармонические возмущения от неровности пути через колесные пары по схеме рисунок 6.1. За начало отсчета принимаем систему координат кузова
. Динамическая система получает гармонические возмущения от неровности пути через колесные пары по схеме рисунок 6.1. За начало отсчета принимаем систему координат кузова ![]() . Перемещения колес первой тележки по отношению к центру масс кузова имеют опережения, а второй – отставание по фазе, учитываемые углами сдвига фаз
. Перемещения колес первой тележки по отношению к центру масс кузова имеют опережения, а второй – отставание по фазе, учитываемые углами сдвига фаз ![]() :
:
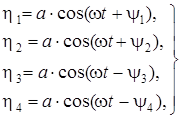 ,(6.1)
,(6.1)
где ![]() – углы сдвига фаз в перемещениях колесных пар:
– углы сдвига фаз в перемещениях колесных пар:
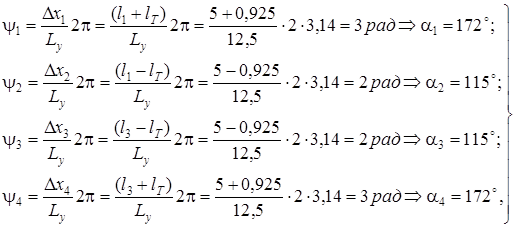 ,(6.2)
,(6.2)
![]() – амплитуда и длина волны вертикальной неровности пути;
– амплитуда и длина волны вертикальной неровности пути;
![]() – частота вынужденных кинематических возмущений,
– частота вынужденных кинематических возмущений,
 (6.3)
(6.3)
При средней скорости движения вагона ![]() получим:
получим: