Курсовая работа: Теорія розмірних зв’язків у виробах машинобудування. Побудова, розрахунок та аналіз розмірних ланцюгів
1. Загальні положення розмірних зв’язків
1.1 Види поверхонь деталей та зв’язків між ними
Побудова машини здійснюється шляхом з’єднання деталей. За функціями, які виконують різні поверхні деталей у машині, їх можна поділити на 4 види: виконавчі поверхні, основні та допоміжні бази і вільні поверхні.
Виконавчі поверхні – це поверхні або їх з’єднання, за допомогою яких машина виконує службове призначення.
У токарного верстата (рис. 1) – це передній кінець шпинделя, конус пінолі задньої бабки, поверхні різцетримача. Поверхні 1 і 2 (рис. 1) призначені для базування патрона, поверхня 3 – для переднього центра при обробці в центрах, поверхня 4 – для заднього центра, поверхні 5 і 6 визначають положення різця відносно оброблюваної поверхні і безпосередньо передають йому необхідний для обробки рух.
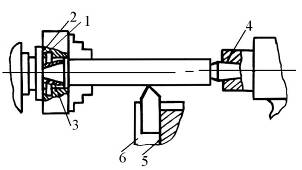
Рис. 1. Види поверхонь на прикладі токарного верстата
У шпинделя поряд з поверхнями 1–3 виконавчими поверхнями є підшипникові шийки, їх торці, бічні поверхні шліців або шпонкових пазів, за допомогою яких шпиндель виконує своє службове призначення, у зубчастого колеса – отвір, один із торців маточини, бічна поверхня шпонкового паза, бічні поверхні зубців.
Основні бази – поверхні деталі, які визначають її положення у виробі.
У вала ступеня редуктора (рис. 2) – це підшипникові шийки 1, 2 і торець 3, у зубчастого колеса – отвір 4, торець 5 і бічна поверхня шпонкового паза, у кришки – циліндрична центруюча поверхня 7, її торець 6 і поверхня одного з отворів для пропускання болтів кріплення кришки.
Допоміжні бази – поверхні деталі, які визначають положення приєднуваних до даної деталі всіх інших деталей.
У корпусу – це отвори під підшипники, у вала – шийка 4, торець 5, шпонкові пази для колеса і напівмуфти, шийка 8 і торець 9.
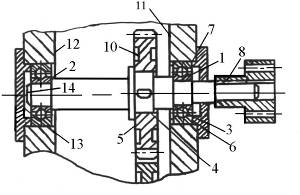
Рис. 2. Види поверхонь на прикладі вузла редуктора
Вільні поверхні – поверхні деталі, які при роботі в машині не контактують з поверхнями інших деталей.
Вільні поверхні допомогають раніше розглянутим поверхням надати деталі потрібних конструктивних форм, які вимагаються їх службовим призначенням.
Приклади вільних поверхонь: у корпусі – поверхні 11, 12, поверхня 13 кришки, торець 14 вала, поверхня 10 зубчастого колеса і та ін.
Для того щоб виконавчі поверхні машини та її механізми мали можливість рухатись та займати відносне положення, необхідно з’єднати деталі машин, які їх несуть, двома типами інших деталей.
До першого типу відносяться всі деталі, які виконують функції ланок кінематичних ланцюгів машини та її механізмів.
До другого типу відносяться деталі, які використовуються для з’єднання та забезпечення відносного положення перших.
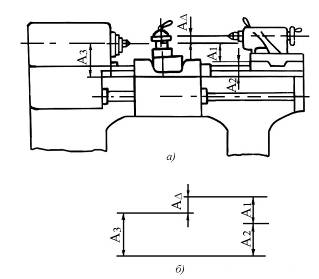
Рис. Конструкційний розмірний ланцюг: а) схема розмірного виду зв’язку; б) схема розмірного ланцюга
Відповідно при складанні машини утворюються два види зв’язків між виконавчими поверхнями: кінематичний і розмірний. Розмірний, у свою чергу, поділяється на два підвиди: перший визначає відстань, другий – повороти поверхонь.
Відстані та повороти виконавчих поверхонь утворюються за допомогою розмірів, які належать цілому ряду деталей.
У загальному випадку всі незалежні, розташовані по замкненому контуру один за одним розміри прийнято називати розмірними ланцюгами [1]. Приклади розмірних ланцюгів показані на рис. 3–5.
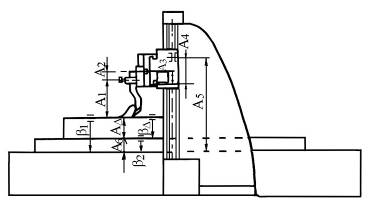
Рис. 4. Технологічний розмірний ланцюг
Для забезпечення точності розмірних зв’язків машин використовується теорія розмірних ланцюгів.
Використання теорії розмірних ланцюгів дозволяє знаходити економічні шляхи вирішення завдань, пов’язаних з досягненням і збереженням потрібної точності технологічного процесу.
--> ЧИТАТЬ ПОЛНОСТЬЮ <--