Реферат: Интерактивные графические системы
Алгоритм вычисления освещённости для этих классов существенно различен. Поэтому для каждой видимой точки устанавливается признак освещённостиïзатенённости. Идея решения данной задачи основана на следующем факте: видимая точка освещена (находится на свету), если её не закрывают от источника света другие поверхности или эта точка является ближайшей к источнику света, среди всех остальных, лежащих на световом луче.
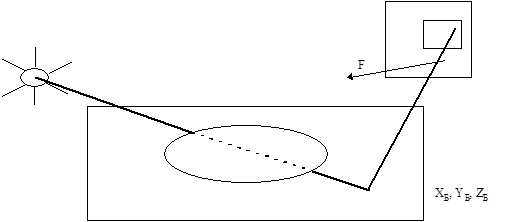
Для определения затенённости точки (XБ , YБ , ZБ ) необходимо провести световой луч из источника света на видимую точку и найти точки пересечения этой прямой со всеми поверхностями, входящими в состав объекта. Поскольку объект состоит из примитивов, то первоначально определяется пересечение луча с поверхностью каждого примитива. Если примитив содержит K поверхностей вида fk (X,Y,Z) = 0, (k = 1,K), то K раз решается система:
 |
X - XB Y - YB Z - ZB
------------- = ------------- = ------------
XSUN - XB YSUN - YB ZSUN - ZB'
fk (X,Y,Z) = 0
Затем среди множества решений отбирают действительное, а среди них точку, ближайшую к источнику света и лежащую на поверхности объекта.
Примечание: Алгоритм определения затенённости идентичен алгоритму определения видимости, но точка центра проектирования заменяется на точку источника излучения, а точка центра рецептора на видимую точку. Если видимая из рецептора точка является ближайшей к источнику света, то она освещена прямыми лучами.
Проведя данные вычисления для всех I*J рецепторов удаётся получить информацию о координатах видимой из каждого рецептора точки (XB , YB , ZB )i j , о номере примитива, номере функции поверхности, которой принадлежит точка и признак затенённости / освещённости.
Примечание: При неизменном ракурсе нет необходимости каждый раз вновь определять видимые точки, при перемещении источника света. Координаты видимых точек остаются неизменными. Пересчитывается только признак освещённости.