Реферат: Методы исследования нелинейных систем
Чтобы получить фазовый портрет исключим время:
 . (16)
. (16)
Пусть ![]() , при этом
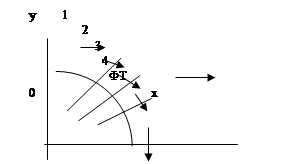
, при этом ![]() – это уравнение линии в плоскости (x 0 y). Каждому значению константы с соответствует некоторая линия, обладающая следующим свойством: в каждой точке линии
– это уравнение линии в плоскости (x 0 y). Каждому значению константы с соответствует некоторая линия, обладающая следующим свойством: в каждой точке линии ![]() , т.е. если фазовая траектория пересекает изоклину, то она имеет постоянный наклон рис. 10.
, т.е. если фазовая траектория пересекает изоклину, то она имеет постоянный наклон рис. 10.
y
Рис. 10
Если провести достаточное число таких линий с соответствующими наклонами, то можно построить фазовый портрет системы. При этом точность зависит от числа изоклин. Направление движения определяется по правилу: если производная ![]() , x >0, то движение такое, что x возрастает.
, x >0, то движение такое, что x возрастает.
5. Построение фазового портрета нелинейной системы
Рассмотрим релейную следящую систему, схема которой приведена на рис. 11.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()

![]()
![]() +
+
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() x1 НЭ У Uпит Д ТГ P U0
x1 НЭ У Uпит Д ТГ P U0
![]()
![]()
![]()
![]() -
-
![]()
![]() x
x
Рис. 11
Если a¹b на вход НЭ с релейной характеристикой (рис. 12) подается сигнал ![]() При этом: b – угол поворота задающей оси; a – угол поворота отрабатывающего потенциометра.
При этом: b – угол поворота задающей оси; a – угол поворота отрабатывающего потенциометра.
 z
z
– a2 – a1
0 a1 a2 x1
Рис. 12
Вследствие этого на двигатель подается напряжение ±![]() , двигатель вращается в определенном направлении в соответствии с полярностью подаваемого напряжения до тех пор, пока оно не станет равным нулю.
, двигатель вращается в определенном направлении в соответствии с полярностью подаваемого напряжения до тех пор, пока оно не станет равным нулю.
Для улучшения качества переходного процесса в систему может быть включена отрицательная обратная связь по скорости двигателя с помощью тахогенератора (ТГ).
Запишем уравнения элементов системы. Для двигателя постоянного тока с независимым возбуждением
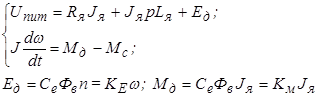 (17)
(17)
Так как поток возбуждения ![]() = const, то
= const, то ![]() . Допустим, момент нагрузки мал, при этом
. Допустим, момент нагрузки мал, при этом ![]() =0.
=0.
Передаточную функцию для якорной цепи K1 (p) можно получить из ее дифференциального уравнения
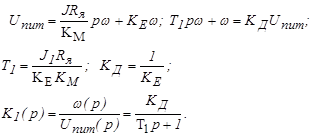 (18)
(18)
Пусть ![]()
Для редуктора и угла поворота вала двигателя
 (19)
(19)