Реферат: Методы исследования нелинейных систем
 . (29)
. (29)
Задаваясь значениями ![]() , строим семейство изоклин. Определяем углы пересечения изоклин фазовыми траекториями.
, строим семейство изоклин. Определяем углы пересечения изоклин фазовыми траекториями.
Так как ![]() . Например, если
. Например, если ![]() , то a = 90°.
, то a = 90°.
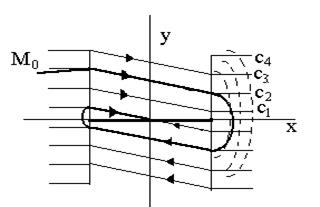
Пусть х < – a, ![]() . Построение выполняем аналогично, так как знак изменился, то будут другие углы пересечений изоклин фазовой траекторией. Фазовый портрет системы приведен на рис. 15.
. Построение выполняем аналогично, так как знак изменился, то будут другие углы пересечений изоклин фазовой траекторией. Фазовый портрет системы приведен на рис. 15.
 |
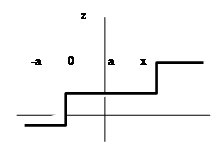 |
Рис. 14 Рис. 15
Снимем упрощение К = 0, т.е. рассмотрим влияние отрицательной обратной связи по скорости двигателя на характер фазовой траектории.
При этом уравнения имеют вид:
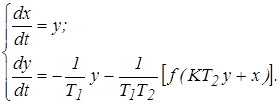 (30)
(30)
Пусть ![]() , при этом переключение будет происходить при условии
, при этом переключение будет происходить при условии ![]() (а не условии х = а), это уравнение линии (рис. 16)
(а не условии х = а), это уравнение линии (рис. 16)
 . (31)
. (31)
При этом количество перерегулирований уменьшается; можно подобрать такой наклон, при котором нет переколебаний.
Рассмотрим фазовый портрет без ограничений. В системе без ограничений фазовый портрет можно представить на трехлистной поверхности с наклонными гранями (рис. 17.) При этом лист 2 соответствует зоне нечувствительности z=0, лист 1 соответствует отрицательным значениям z, а лист 3 положительным. Вследствие гистерезиса имеет место частичное наложение листов.
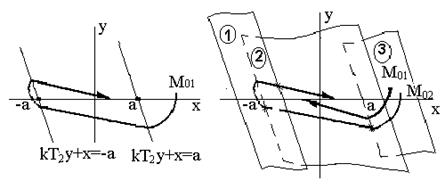
Рис. 16 Рис. 17
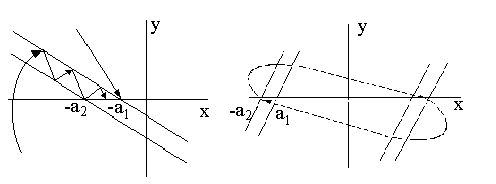
Исследуем систему. Исследуем влияние отрицательной обратной связи по скорости двигателя (т.е. влияние величины – К). Пусть значение К увеличивается, при этом наклон прямых уменьшается, и может получиться, что срез будет более пологим чем наклон характеристики в средней части. Это приводит к частым переключениям. Такой режим называется скользящим. Если зона ![]() очень узкая, то движение как бы соскальзывает к установившемуся режиму (рис. 18а).
очень узкая, то движение как бы соскальзывает к установившемуся режиму (рис. 18а).
Если изменить знак обратной связи с отрицательной связи на положительную связь, то при этом изменится наклон линий переключения, и количество колебаний будет увеличиваться, система будет "раскачиваться". Система работает, как генератор и может появиться либо замкнутый цикл – автоколебания, либо расходящийся переходный процесс (рис. 18б).
а) б)
Рис. 18
Достоинства метода: простота и наглядность для систем 2-го порядка; пригодность для любого типа нелинейных элементов.
Недостатки: метод громоздкий для систем выше 2-го порядка, поэтому при n >2 не применяется.
Рассмотрим несколько примеров построения фазовых портретов нелинейных систем управления
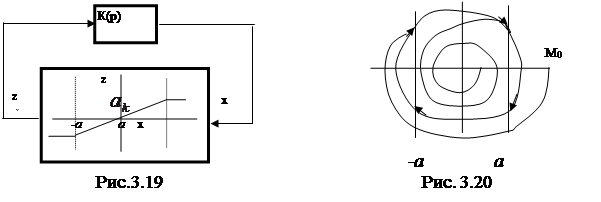
Пример 1. Пусть задана система, состоящая из линейной части и нелинейного элемента (усилитель с ограничением по модулю) (рис. 19). Это кусочно-линейная система, так как на отдельных участках она ведет себя как линейная (в области) – а, +а[). Допустим в области (] – а, +а[) коэффициент усиления большой и система неустойчива а фазовый портрет характеризуется особой точкой "неустойчивый фокус". За пределами области коэффициент усиления мал, допустим, что при этом система устойчива и характеризуется особой точкой – "устойчивый фокус".
При больших отклонениях x > |a| общий коэффициент усиления системы мал, система устойчива, процесс затухает.
При малых отклонениях общий коэффициент усиления системы большой – процесс расходится к замкнутой траектории, которая характеризует наличие устойчивых автоколебаний (рис. 20).
В этой системе три типа движений: автоколебания; сходящиеся колебания; расходящиеся колебания
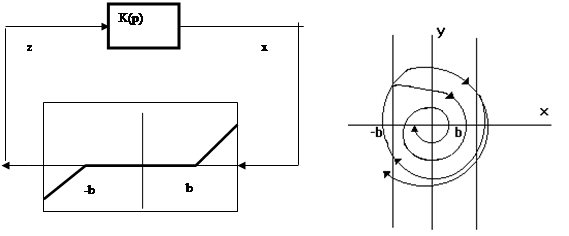
Пример 2. Пусть задана система с характеристикой нелинейного звена типа "зона нечувствительности" (рис. 21). Необходимо построить фазовый
портрет данной системы, определить наличие предельных циклов и проанализировать их устойчивость.
 |