Реферат: Теория механизмов и машин 2
![]() - число пар четвертого класса;
- число пар четвертого класса;
![]() - число пар пятого класса;
- число пар пятого класса;
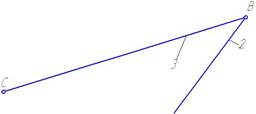
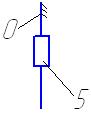
Рисунок 1
 Для определения величины коэффициента n проанализируем структурную схему механизма (рисунок 1).
Для определения величины коэффициента n проанализируем структурную схему механизма (рисунок 1).
Структурная схема механизма состоит из шести звеньев, рассмотрим движения каждого звена и занесем их в Таблицу 1- Звенья механизма:
Таблица 1 – Звенья механизма
| Вид движения | Название звена | № звена |
| неподвижное | стойка | 0 |
| вращательное | кривошип | 1 |
| сложное вращательное | шатун | 2 |
| поступательное | коромысло | 3 |
| поступательное | ползун | 4 |
| поступательное | ползун | 5 |
при этом звенья 1– 5 являются подвижными звеньями, а стойка 0 – неподвижным звеном. Она представлена в составе структурной схемы двумя направляющими ползуна и шарнирно-неподвижной опорой. Следовательно, n =5.
Для определения коэффициентов и найдем все кинематические пары, входящие в состав рассматриваемой кинематической цепи. Результаты исследований заносим в Таблицу 2 – Кинематические пары.
Таблица 2 – Кинематические пары
| № | Номер звеньев/ название | Схема кинематической пары | Класс / подвижность | Вид контакта/замыкание |
| 1 | 2 | 3 | 4 | 5 |
| 1 | 0 – 1/ вращательная |
| 5/1 | поверхность (низшая)/ геометрическое |
| 2 | 1 – 2/ вращательная |
| 5/1 | поверхность (низшая)/ геометрическое |
| 3 | 2–3/ вращательная |
| 5/1 | поверхность (низшая)/ геометрическое |
| 4 | 3–0/ вращательная |
| 5/1 | поверхность (низшая)/ геометрическое |
| 5 | 3–4/ вращательная |
| 5/1 | поверхность (низшая)/ геометрическое |
| 6 | 4 – 5/ вращательная |
| 5/1 | поверхность (низшая)/ геометрическое |
| 7 | 5 – 0/ поступательная |
| 5/1 | поверхность (низшая)/ геометрическое |


Из анализа данных табл. 2 следует, что исследуемый механизм состоит из семи пар пятого класса и образует замкнутую кинематическую цепь. Следовательно, ![]() , а
, а ![]() .
.
Подставив найденные значения коэффициентов n , ![]() и
и ![]() в формулу Чебышева, получим:
в формулу Чебышева, получим:
![]()
Для выявления структурного состава механизма разбиваем рассматриваемую схему на структурные группы Ассура.
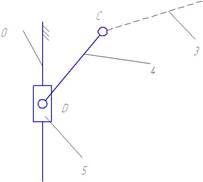
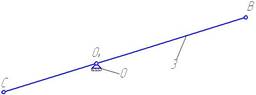
Рисунок 2
Группа звеньев 5 – 4 (рисунок 2). Данная группа состоит из двух подвижных звеньев:
шатун 4 и ползун 5;
двух поводков:
коромысло 3 и направляющая (стойка) 0:
и трех кинематических пар:
5 – 4 вращательная пара пятого класса;
4 – 3 вращательная пара пятого класса;
5 – 0 поступательная пара пятого класса; тогда ![]() и
и ![]() .
.
Подставив выявленные значения коэффициентов в формулу Чебышева, получим:
![]()
 Следовательно, группа звеньев 4-5 является структурной группой 2 класса (число подвижных звеньев n=2), 2 порядка (структурная группа имеет 2 поводка), 2 вида (ВВП).
Следовательно, группа звеньев 4-5 является структурной группой 2 класса (число подвижных звеньев n=2), 2 порядка (структурная группа имеет 2 поводка), 2 вида (ВВП).
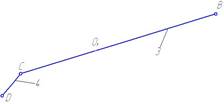
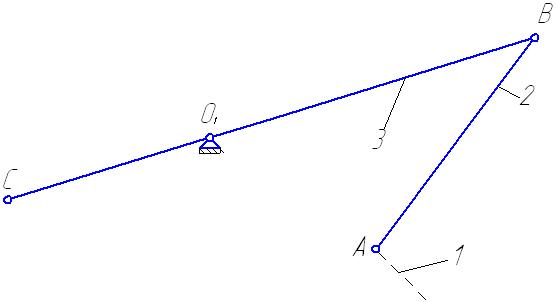
Рисунок 3
Группа звеньев 3 – 2 (рисунок 3). Данная группа состоит из двух подвижных звеньев: коромысло 3 и шатун 2; двух поводков: шатун 1 и стойка 0, и трех кинематических пар:
3 – 2 вращательная пара пятого класса;
1 – 2 вращательная пара пятого класса;
3 – 0 поступательная пара пятого класса; тогда ![]() и
и ![]() .
.