Реферат: Теория механизмов и машин 2
Следовательно, структурная группа звеньев 2-3 является структурной группой 2 класса (число подвижных звеньев n=2), 2 порядка (структурная группа имеет 2 поводка), 1 вида (ВВВ).
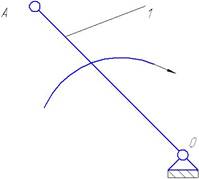
Рисунок 4
Группа звеньев 0 – 1 (рисунок 4). Данная группа состоит из подвижного звена кривошипа 1, стойки 0 и одной кинематической пары:
0 – 1 – вращательная пара пятого класса;
тогда ![]() и
и ![]() .
.
Подставляя найденные значения коэффициентов в формулу Чебышева, получим:
![]()
Данный результат означает, что для однозначного определения возможных положений звеньев данного механизма достаточно одной обобщенной координаты.
Следовательно, группа звеньев 0 – 1 не является структурной группой Ассура, а представляет собой первичный механизм, подвижность которого равна 1.
Из проведённого анализа следует, что подвижность данного сложного рычажного механизма равна 1; механизм имеет следующий структурный состав: первичный механизм с подвижностью равной 1 и две структурные группы 2 класса, 2 порядка, 1 и 2 вида.
|
 | ||
| ||
 | ||
Вывод:
Из проведенного анализа следует , что подвижность механизма равна 1. Механизм имеет следующий структурный состав: первичный механизм с подвижностью равной 1, и две структурные группы Ассура 2 класса, 2 порядка, 1 и 2 вида. Класс механизма определяется наивысшим классом структурной группы, входящей в его состав, следовательно данный механизм 2 класса.
2 Синтез кинематической схемы плоского рычажного механизма по заданным параметрам
Чтобы построить кинематическую схему плоского рычажного механизма по заданным параметрам, нужно найти масштабный коэффициент длины ![]() , который рассчитывается по формуле:
, который рассчитывается по формуле:
![]()
где ![]() – действительная длина коромысла в метрах;
– действительная длина коромысла в метрах;
![]() – размер коромысла в миллиметрах принимаемый на чертеже.
– размер коромысла в миллиметрах принимаемый на чертеже.
Остальные размеры звеньев вычислим по формуле:
![]()
где i – номер звена, для которого вычисляется длина на кинематической схеме.
Переходим к построению положения звеньев механизма.
Для этого на плоскости выбираем точку ![]() . Относительно ее находим расположение точки
. Относительно ее находим расположение точки ![]() и линии, вдоль которой движется ползун. Из точки
и линии, вдоль которой движется ползун. Из точки ![]() радиусом
радиусом ![]() проводим окружность. Из точки
проводим окружность. Из точки ![]() проводим дуги окружностей радиусами
проводим дуги окружностей радиусами ![]() и
и ![]() . Проводим отрезок
. Проводим отрезок ![]() , из точки А -отрезок длиной
, из точки А -отрезок длиной ![]() до пересечения с дугой окружности радиусом
до пересечения с дугой окружности радиусом ![]() . Затем из получившейся точки В строим отрезок ВС =
. Затем из получившейся точки В строим отрезок ВС = ![]() , проходящий через
, проходящий через ![]() - мы нашли точку С . Из нее проводим прямую длиной
- мы нашли точку С . Из нее проводим прямую длиной ![]() до пересечения с линией движения ползуна и в результате этого мы нашли точку D .
до пересечения с линией движения ползуна и в результате этого мы нашли точку D .
3 Кинематический анализ
3.1 Построение 12-ти планов положений
Построим двенадцать положений механизма в масштабном коэффициенте ![]() м/мм (лист 1). Чтобы найти крайние положения, надо из точки О провести отрезки длиной
м/мм (лист 1). Чтобы найти крайние положения, надо из точки О провести отрезки длиной ![]() (крайнее верхнее положение) до пересечения с дугой окружности радиусом
(крайнее верхнее положение) до пересечения с дугой окружности радиусом ![]() и отрезок длинной
и отрезок длинной ![]() (крайнее нижнее положение). Верхнее положение кривошипа вдоль этой прямой и будет начальным положением. Каждое новое положение механизма получим поворотом кривошипа на 30 градусов в сторону вращения и повтором действий, описанных в пункте 1.2.
(крайнее нижнее положение). Верхнее положение кривошипа вдоль этой прямой и будет начальным положением. Каждое новое положение механизма получим поворотом кривошипа на 30 градусов в сторону вращения и повтором действий, описанных в пункте 1.2.
3.2 Построение планов скоростей относительно 12-ти планов положений для седьмого положения механизма
Проанализируем полученную схему механизма: точка О является неподвижной точкой, следовательно, модуль скорости этой точки равен нулю ![]() .
.
Вектор скорости точки А представляет собой геометрическую сумму вектора скорости точки О и скорости относительного вращательного движения точки А вокруг О :
![]()
![]()
где ![]() – вектор скорости точки А ;
– вектор скорости точки А ;
![]() – вектор скорости точки О , взятой за полюс;
– вектор скорости точки О , взятой за полюс;