Реферат: Типы регулярных регуляторов

Рисунок 2. Структурная схема системы, представленной на рис. 1.
На рис.2 видно, что выход системы ручного регулирования по воздействию связан с её входом через оператора (пунктир рис.1 и 2).Из этого следует общая идея перехода от ручного к автоматического регулированию – подать регулирующее воздействие с выхода системы на её вход через определённое техническое устройство, без человека-оператора Ч-О.
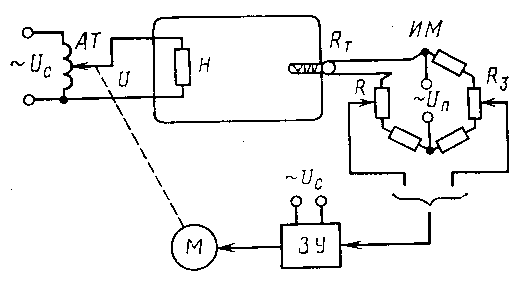
Рисунок 3. Схема автоматической системы регулирования (АСР).
На рис. 3 показан переход от ручного регулирования температуры сушительного шкафа (рис.1) к автоматического её регулированию. Температура в сушительном шкафу (рис.3) измеряется термометром сопротивления R т, включённым в одном из плеч измерительного моста ИМ. При заданном значении температуры измерительный мост уравновешен, на вход электронного усилителя ЭУ напряжение не подаётся. При отклонении температуры от заданного значения соответственно изменяется сопротивление R т, что вызывает разбаланс измерительного моста ИМ. На электронный усилитель подаётся напряжение разбаланса, и электродвигатель М начинает вращаться, перемещая движок автотрансформатора АТ в сторону ликвидации отклонения температуры шкафа от заданного значения. При достижении заданного значения температуры измерительный мост ИМ балансируется, электродвигатель М останавливается и система приходит в равновесное состояние.
Заданное значение температуры устанавливается путём перемещения оператором движка потециометра R з. Потециометр R служит для коррекции равновесия ИМ при значении температуры в сушильном шкафу, равном заданному.
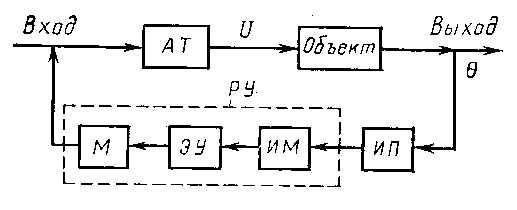
Рисунок 4. Структурная схема АСР.
На рис.4 в общем виде изображена функциональная структурная схема автоматической системы регулирования (АСР) по рис.3. Сравнивая схемы (рис. 2 и 4), видим, что в автоматической системе регулирования температуры в сушильном шкафу функции управления вместо человека-оператора осуществляет регулирующее устройство РУ, состоящее из измерительного моста ИМ, электронного усилителя ЭУ и электродвигателя М.
Комплекс технических средств (устройств), присоединяемых к регулируемому объекту и обеспечивающих автоматическое поддержание заданного значения его регулируемой величины или автоматическое изменение её по заданному закону, называют автоматическим регулятором.
Выход объекта регулирования (регулируемая величина) воздействует на вход регулятора; выход регулятора воздействует на вход объекта регулирования.
В общем случае совокупность управляемого объекта и автоматического управляющего устройства, определённым образом воздействующих между собой, называют автоматической системой. Автоматическая система с замкнутой цепью воздействия, в которой управляющее (регулирующее) воздействие вырабатывается в результате истинного значения управляемой (регулируемой) величины с заданным (предписанным) её значением, называется автоматической системой регулирования (АСР).
Процесс, посредством которого одну или несколько регулируемых величин приводят в соответствие с их постоянными или изменяющимися по определённому закону заданными значениями, достигаемое техническими средствами путём выработки воздействия на эти величины в результате сравнения их действительных значений с заданными, называется автоматическим регулированием.
Автоматическое регулирование является частным случаем более общего понятия автоматического управления.
Автоматическим управлением называется процесс, при котором операции выполняются посредством системы, функционирующей без вмешательства человека в соответствии с заранее заданным алгоритмом.
Под алгоритмом в общем случае понимается совокупность действий, Выполнение которых в определённой последовательности приводит к решению поставленной задачи. Алгоритм управления – алгоритм, определяющий процесс управления некоторым объектом.
Из рис.3 и 4 следует, что автоматическая система регулирования состоит из ряда элементов, выполняющих различные функции. (Основные элементы, из которых формируется автоматическая система регулирования, рассмотрены ниже.)
Интегрирующее звено.Выходная величина интегрирующего звена пропорциональна интегралу входной величины, т. е.
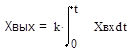 (1)
(1)
Дифференциальное уравнение интегрирующего звена имеет вид
dx ВЫХ / dt = kx ВХ (2)
Коэффициент k называют коэффициентом усиления (коэффициентом передачи) звена по скорости. Он численно равен скорости изменения выходной величины при единичном значении входной величины. Преобразовав дифференциальное уравнение звена по Лапласу, получим px ВЫХ ( p ) = kx ВХ ( p ) , откуда находим передаточную функцию звена:
W (p) = k / p* (3)
Если входная и выходная величины имеют одинаковую размерность, то из выраженияdx ВЫХ / dt = kx ВХ следует, что коэффициент k имеет размерность c-1 . В этом случае дифференциальное уравнение dx ВЫХ / dt = kx ВХ удобнее представить в виде
dx ВЫХ / dt = x ВХ / Т, (4)
где Т=1/ k
При этом передаточная функция звена примет вид
W (p) = 1 / Tp (5)