Реферат: Типы регулярных регуляторов
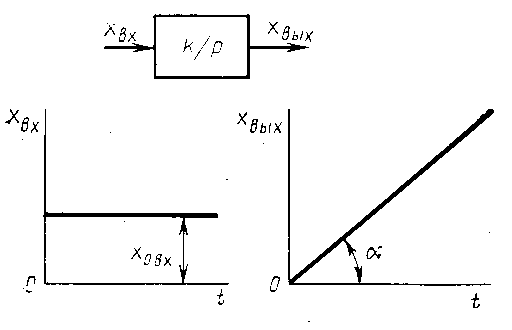
Рисунок 5. Передаточная функция и временная характеристика интегрирующего звена.
На рис.5 Представлен характер изменения выходной величины интегрирующего звена при подаче на его вход постоянной входной величины x 0ВХ , изображение которой x ВХ ( p )= x 0ВХ / р
Тогда из уравнения W ( p )= 1 / Tp получим
x 0ВХ = L -1 [ x ВЫХ ( p )] = L -1 [ k x 0ВХ / p 2 ] = k x 0ВХ * t (6)
Таким образом, в этом случае x вых изменяется по прямой, проходящей через начало координат под углом a =arktkx вх оси абсцисс.
Из передаточной функции W ( p )= 1/ Tp звена W ( p )= k / p определяем
W (i w) = k / j w = - j k / w; U (w) = 0;
V (w) = - k / w; W (w) = k / w; j (w) = - p / 2 (7)
Согласно формуле
W ( i w ) = k e – j p / 2 / w . (8)
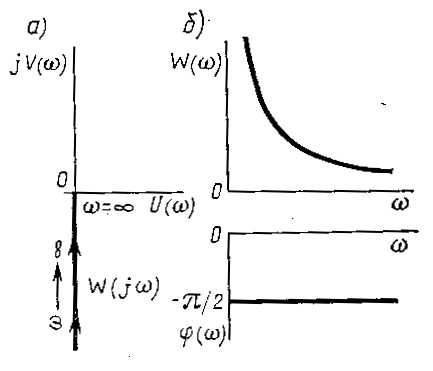
Рисунок 6. Частотные характеристики интегрирующего звена.
Частотные характеристики представлены на рис. 6, из которого следует, что а) КЧХ звенаW ( jw ) при изменение w от 0 до ¥ совпадает с отрицательной мнимой полуосью (рис.6а);
б) при всех частотах выходные колебания отстают по фазе от входных на угол 90° (рис.6в)
в) АЧХ представляет собой гиперболу, т.е. чем меньше частота входного сигнала, тем больше этот сигнал усиливается звеном. При w = 0 коэффициент усиления равен бесконечности, и, наоборот, при w = ¥ коэффициент усиления звена равен нулю (рис.6б).
Логарифмируя W ( w ) в (7), получаем
L (w) = 20 lg k – 20 lg w (9)
Таким образом, ЛАЧХ представляет собой прямую линию, пересекающую при k = 0 ось абсцисс в точке w = 1 и имеющую наклон к оси абсцисс 20 дБ / дек. При k¹ 1 ЛАЧХ перемещается параллельно оси ординат на величину 20 l gk (рис.7а)
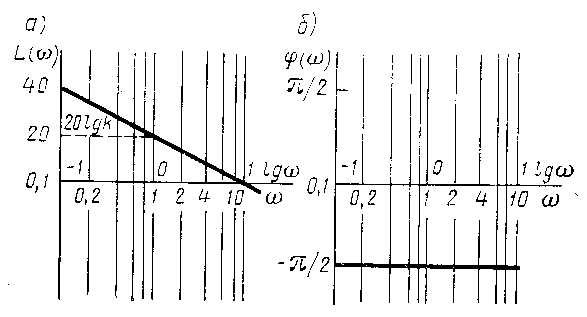
Рисунок 7. Логарифмические частотные характеристики интегрирующего звена.
Логарифмическая фазо-частотная характеристика не зависит от частоты и равна - p / 2 (рис.7б). На рис.7 на оси абсцисс для сравнения указаны значения w и lg w , а также нанесена координатная сетка частот.
Пример1.
Определим динамические свойства гидравлического механизма (рис.8) , который широко применяется в современных системах регулирования. Входной величиной для него является перепад давления p ВХ = p 1 - p 2 , а выходной – перемещение D s ВЫХ поршня.
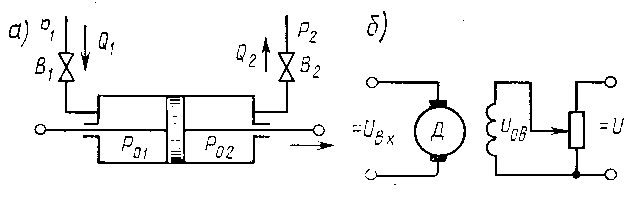
Рисунок 8. Примеры интегрирующих звеньев.
Сила давления на поршень равна p = ( p 01 - p 02 ) F , где F - эффективная площадь поршня. Если пренебречь трением и инерцией поршня. То можно считать, что это усилие целиком расходуется преодоление внешней нагрузки, приложенной к поршню (сопротивление перемещению регулирующего органа, заслонки, шибера и т.п.):
р В . Н = (p01 - p02 ) F (10)
При небольших отклонениях от состояния равновесия расходы жидкости через вентили В1 и В2 пропорциональны перепадам давления на вентилях
Q1 = k1 (p1 - p01 ); Q2 = k2 (p02 - p2 ) (11)