Реферат: Типы регулярных регуляторов
При настройке П-регулятора следует иметь в виду, что чрезмерное увеличение запаса устойчивости улучшает качество регулирования, так как при этом затягивается переходной в системе. С учётом этого для системы с П-регулятором имеется определённое значение коэффициента его передачи k, который и следует выбрать при настройке системы.
Интегральные регуляторы.
Регуляторы с законом регулирования  называются интегральными или И-регуляторами.
называются интегральными или И-регуляторами.
Хотя путём выбора оптимального значения коэффициенты передачи и можно существенно уменьшить, установив ошибку регулирования, её полная, ликвидация в системе с П-регулятором даже теоретически невозможна. Основное назначение законов И-регуляторов – ликвидация установившихся ошибок регулирования. Как самостоятельные регуляторы И-регуляторы применяются редко из-за медленного возрастания регулирующего воздействия на объект при отклонении регулируемой величины.
Дифференциальные регуляторы.
П-регуляторы оказывают на объект существенное регулирующее воздействие, когда регулируемая величина уже имеет значительное отклонение от заданного значения.
И-регуляторы оказывают регулирующее воздействие постоянно наращивая его по интегралу. П- и И-регуляторы не могут упредить ожидаемое отклонение регулируемой величины, а реагируют только на уже имеющиеся в данный момент нарушения технологического процесса. Для упреждения нарушений используют Д-регуляторы, работающие по закону y = kdx / dt.
Пропорциональные регуляторы.
Приближение точки пересечения КЧХ разомкнутой системы отрицательной полуоси к точке В (-1, j 0) определяет запас устойчивости по модулю с замкнутой автоматической системы регулирования. При приближении КЧХ к точке В увеличивается колебательность в замкнутой системе; при пересечении этой точки (запас устойчивости с = 0) в замкнутой системе возникают незатухающие колебания, а при охвате КЧХ точки В (-1, j 0) замкнутая система неустойчива. Так как модуль КЧХ системы определяется коэффициентом передачи (усиления) разомкнутой системы на данной частоте, то степень приближения КЧХ разомкнутой системы можно регулировать путём изменения её коэффициента передачи k .
Комплексная частотная характеристика разомкнутой системы
W ( j w ) = WP ( j w ) W ОБ ( j w ) (26)
Из этого выражения следует, что коэффициент передачи разомкнутой системы можно изменять с помощью автоматического регулятора, если его комплексная частотная характеристика имеет вид
WC (j w) = kP , (27)
Где k P - коэффициент передачи регулятора, являющийся его параметром настройки. При этом КЧХ разомкнутой системы имеет вид
W ( j w ) = k P W ОБ ( j w ). (28)
Из этого выражения следует, что при подключении кобъекту такого регулятра КЧХ объекта увеличивается на каждой частоте пропорционально в kp раз. Поэтому регулятора с таким пропорциональным законом регулирования называют пропорциональными регуляторами или П-регуляторами.
В динамическом отношении П-регуляторы являются усилительным звеном. Передаточная функция П-регулятора
W П (р) = k P . (29)
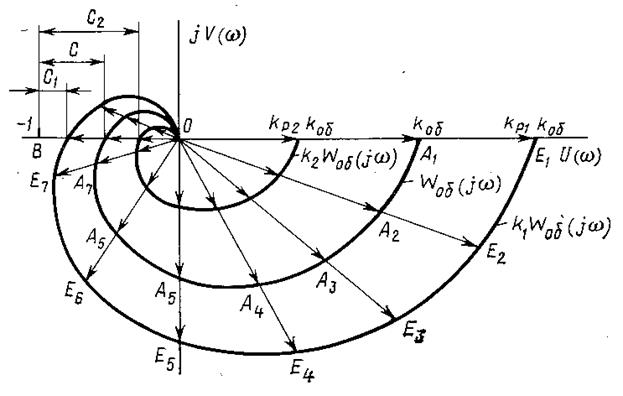
Рисунок 14. Характер изменения КЧХ разомкнутой системы с П-регулятором.
На рис.14 представлены КЧХ разомкнутой системы с П-регулятором. При k P = 1 КЧХ разомкнутой системы совпадает с КЧХ объекта регулирования. При k P > 1 КЧХ разомкнутой системы приближается к точке В(-1, j 0) ; при k P < 1 отходит от этой точки. В качестве примера на рис.14 изображены две КЧХ разомкнутой системы при k P = k P 1 = 1,5 и k P = k P 2 = 0,5.
В соответствии с W ( j w ) = k P W ОБ ( j w ) на рис.14, например, вектор КЧХ разомкнутой системы равен ОЕ2 = k P 1 * ОА2 = 1,5 ОА2 , где ОА2 - вектор КЧХ объекта.
Закон регулирования П-регулятора является статическим. Переходные процессы П-регулятора описываются отношением
Y = kP x (30)
где x - входное воздействие на регулятор, равное отклонению Е регулируемой величины от заданного значения; y- воздействие регулятора
на регулирующий орган, направленное на ликвидацию отклонения регулируемой величины от заданного значения.
При настройке П-регулятора следует иметь в виду, что чрезмерное увеличение запаса устойчивости с ухудшает качество регулирования, т.к. при этом затягивается переходной процесс в системе (увеличивается время регулирования), увеличиваются динамическая ошибка регулирования, установившаяся ошибка регулирования как по каналу задающего, так и по каналу возмущающего воздействий.
С учётом этого для системы с П-регулятором имеется определённое оптимальное значение коэффициента его передачи k p, которое и следует выбирать при настройке системы.
Интегральные регуляторы.
При статистическом объекте и статистическом регуляторе АСР является статистической как по каналу задающего, так и по каналу возмущающего воздействий.
При астатическом объекте система астатическая по каналу задающего воздействия и статическая – по каналу возмущающего воздействия.
Таким образом, АСР П-регулятором всегда имеет установившуюся ошибку регулирования по канал возмущающего воздействия, а при статическом объекте – и по каналу задающего воздействия, Хотя путём выбора оптимального значения коэффициента передачи П-регулятора и можно существенно уменьшить установившуюся ошибку регулирования,её полная ликвидация в системе с П–регулятором даже теоретически невозможна.