Реферат: Типы регулярных регуляторов
Из этого выражения следует, что реальное интегрирующее звено можно рассматривать как последовательное соединение идеального интегрирующего и апериодического звеньев. Коэффициент k реального интегрирующего звена равен коэффициенту передачи идеального интегрирующего звена.
Постоянная времени Т определяет инерционность процесса интегрирования. При этом чем меньше Т, тем больше по своим свойствам реальное интегрирующее звено приближается к идеальному интегрирующему. Примером реального интегрирующего звена может служить электро двигатель, если в динамическом отношении нельзя пренебречь его электромеханической инерцией. В этом случае связь между напряжением двигателя u ВЫХ и его углом поворота b ВЫХ определяется дифференциальным уравнением
TM d 2 b ВЫХ / dt 2 + d b ВЫХ / dt = k u ВХ (20)
где Т M – постоянная времени, определяемая инерционностью якоря двигателя и перемещаемых этим двигателем масс; k – коэффициент передачи двигателя по каналу: подводимое напряжение к двигателю – угловая скорость двигателя.
Из выражения (20) следует, что в рассматриваем случае в динамическом отношении электродвигатель является реальным интегрирующим звеном и его передаточная функция определяется выражением (19).
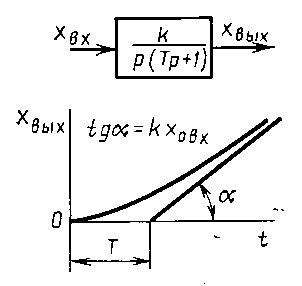
Рисунок 11. Передаточная функция и переходной процесс реального интегрирующего звена.
На рис.11 представлен характер изменения выходной величины x ВЫХ реального интегрирующего звена при подаче на вход постоянного сигнала x 0ВХ
Реальное дифференцирующее звено.
Дифференциальное уравнение реальное дифференцирующего звена имеет вид
T dx ВЫХ / dt + x ВЫХ = k dx ВХ / dt (21)
С учётом этого передаточная функция звена
W (p) = k p / (T p + 1) (22)
Таким образом, реальное дифференцирующее звено можно рассматривать как последовательное соединение идеального дифференцирующего звена и апериодического звена. При этом, чем меньше постоянная времени Т , тем больше реальное дифференцирующее звено приближается к идеальному дифференцирующему.
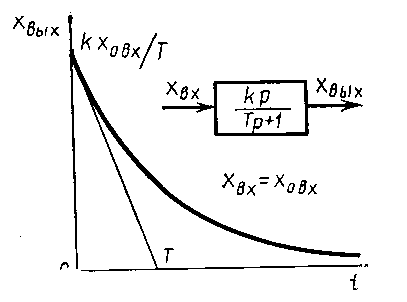
Рисунок 12. Передаточная функция и переходной процесс реального дифференцирующего звена.
Переходный процесс реального дифференцирующего звена представлен на рис.12. Чем меньше Т , тем ближе реальное дифференцирующее звено приближается к идеальному. Если Т стремится к нулю, то получаем идеальное дифференцирующее звено с коэффициентом передачи k .
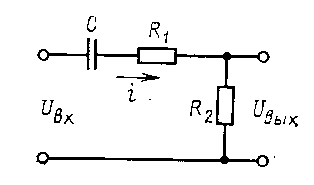
Рисунок 13. Схема реального дифференцирующего звена.
Пример. Определим динамическиесвойства RC-цепи, представленной на рис.13, для которой
u ВЫХ = (1 / C) ¦ i dt + i R1 + u ВЫХ ; u ВЫХ = i R2 . (23)
Преобразуя эти уравнения по Лапласу, получаем
R 2 C p U ВХ ( p ) = [1 + C ( R 1 + R 2 ) p ] U ВЫХ ( p ) (24)
Передаточная функция цепи
W (p) = k Т p / (T p + 1) (25)
Таким образом, в динамическом отношении RC-цепь (рис.13) является реальным дифференцирующим звеном.
Постоянная времени и коэффициент передачи звенаk = R 2 / ( R 1 + R 2 ); T = C ( R 1 + R 2 ) .
Изображение выходной величины при скачкообразном изменении входной величины до х0ВХ
Типы регулярных регуляторов (PID) ПИД.
|
| ||
![]()
![]()
![]() Сигнал
Сигнал
 |  |
ОС
 |
Сумматор Упр. Устройство Обр. Связь Орг. Регистр.
Тепловые регуляторы.
Регулятор с пропорциональным законом регулирования называется пропорциональным регулятором или П-регулятором.
В динамическом отношении П-регуляторы являются усилительным звеном.