Реферат: Типы регулярных регуляторов
W (р) = k P / р (31)
Сравнивая W (р) = k P / р и W (р) = k / р , видим ,что регулятор с передаточной функцией W (р) = k P / р в динамическом отношении является интегрирующим звеном. Выходная величина такого регулятора пропорциональна интегралу от входной величины, т.е.
 (32)
(32)
Поэтому регуляторы с таким законом регулирования называются интегральными или сокращённ И-регуляторами.
Коэффициент передачи k p определяет степень ввода в закон регулирования интеграла и является параметром настройки И-регулятора. В соответствии с L (w) = 20 lg k – 20 lg w КЧХ И-регулятораимеет вид
W И (i w) = k P e - j p / 2 / w . (33)
КЧХ разомкнутой системы с И-регулятором определяется выражением
W (i w) = k P e - j p / 2 W ОБ (i w) / w . (34)
Из этого выражения следует, что в системе с И-регулятором вектор КЧХ объекта на данной частоте увеличивается в k p/w раз и поворачивается по часовой стрелке на 90°.
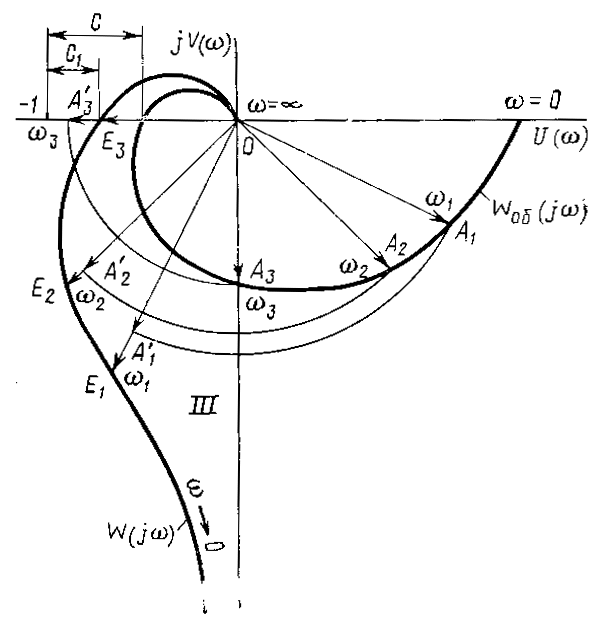
Рисунок 15. Кмплексные частотные характеристики объекта Wоб (jw) и разомкнутой АСП W (jw) с И-регулятором.
На рис.15 выполнено построение КЧХ разомкнутой системы с И-регулятором и известной КЧХ объекта регулирования. Каждый вектор КЧХ разомкнутой системы связан с КЧХ объекта выражением … Например,
Так как при w ®0 отношениеkP / w ®¥, то КЧХ разомкнутой системы с И-регулятором при w ®0 уходит в бесконечность, асимптотически приближаясь в квандранте III к отрицательному направлению мнимой полуоси. Основное назначение закона И-регулирования – ликвидация установившейся ошибки регулирования.
Как самостоятельные регуляторы И-регулиры применяются редко из-за медленного нарастания регулирующего воздействия на объект при отклонении регулируемой величины. В связи с этим И-регулиры в основном применяются для регулирования в комплекте с регуляторами, формирующими другие законы регулирования, например с П-регуляторами.
Обычно закон И-регулирования формируется не самостоятельным регулятором, а блоком или устройством, конструктивно являющимся составной частью регулятора, реализующего более сложный, например пропорционально-интегральный, закон регулирования.
Аналогично W ( p ) = 1 / T p передаточная функция И-регулятора имеет вид
W И (p) = 1 / (T И p), (35)
где T И - постоянная времени интегрирования – параметр настройки регулятора.
Рассмотрим физический смысл постоянной времени интегрирования.
Закон И-регулирования И-регулирования с учётом (35) выражается формулой
y = (1 / T И ) ¦ x dt (36)
Предположим, что на вход регулятора поступил постоянный сигнал х = х 0ВХ . При этом выходной сигнал изменяется по закону y = (1 / T И ) ¦ x 0ВХ dt = х 0ВХ t / T И . По истечении времени t = T и значение выходного сигнала равно у = х 0ВХ .
Таким образом, постоянная времени интегрирования И-регулятора равна , в течении которого с момента поступления на вход регулятора постоянного сигнала сигнал на выходе регулятора достигает значения. Равного значению входного сигнала.
Дифференциальные регулирующие устройства.
Пропорциональные регуляторы оказывают на объект существенное регулирующее воздействие, когда регулируемая величина уже имеет значительное отклонение от заданного значения. Интегральные регуляторы оказывают регулирующее воздействие, постоянно наращивая его по интегралу.
Таким образом, П- и И-регуляторы не могут упреждать ожидаемые отклонения регулируемой величины, регулируя только на уже имеющиеся в данный момент нарушения технологического процесса. В то же время, если регулируемая величина в какой-то момент времени начинает быстро отклонятся от заданного значения, то это значит, что на объект поступили значительные возмущения и что отклонения регулируемой величины в результате этого воздействия будут значительными.
В этом случае желательно иметь регулятор, который вырабатывал бы регулирующее воздействие пропорционально скорости отклонения регулируемой величины от заданного значения
У = ТД dx / dt (37)
Такой регулятор при большой скорости отклонения регулируемой величины, когда в начальный момент П-регулятор оказывает слабое регулирующее на объект, а ?