Учебное пособие: Математическое моделирование и расчет систем управления техническими объектами
Идеальными источниками механической энергии являются источник скорости и источник силы . Уравнения связей механических двухполюсников выражают условия равновесия сил и непрерывности перемещений (скоростей). В соответствии с приведенными ранее уравнениями механических двухполюсников и уравнениями связей записывают дифференциальное уравнение для перемещений:
![]() .
.
В этом однородном уравнении отсутствует правая часть, описывающая внешнее воздействие на механическую систему, т. е. она автономна. Свободные движения автономной системы являются следствием ненулевых начальных условий, например начального смещения х (0) от равновесного состояния.
При моделировании объектов различной природы – электрической, механической поступательной и вращательной, гидравлической или пневматической и др., а также смешанной природы, например электромеханической (двигатели, генераторы), могут быть выделены аналогичные пассивные и активные компоненты. Дальнейшей абстракцией при построении моделей физических объектов с сосредоточенными компонентами является полюсный граф . Эти универсальные топологические модели позволяют унифицировать составление уравнений. Специфика предметной области проявляется только на этапе построения схемы и полюсного графа, а также на заключительном этапе интерпретации результатов анализа и синтеза.
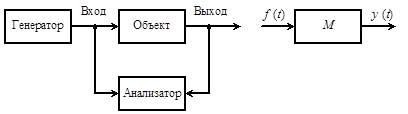
Рис.3. Схема экспериментального исследования объекта
При проектировании систем управления, когда некоторые элементы реально не существуют, аналитический метод построения моделей оказывается единственно возможным.
Если свойства объекта познаны в недостаточной степени, либо происходящие явления слишком сложны для аналитического описания, для построения математических моделей реально существующих объектов применяется экспериментальный способ, который заключается в активных экспериментах над объектом или в пассивной регистрации его поведения в режиме нормальной эксплуатации (рис.3, а ). В результате обработки данных наблюдений получают модели в требуемой форме. Совокупность этих операций объединяется термином идентификация объекта . В результате идентификации получаются модели вход-выход (рис.3, б ). Модель зависит не только от свойств объекта, но также от входных сигналов, их разнообразия.
Практически об идентифицируемом объекте всегда имеется какая-то априорная информация, т. е. он не является «черным ящиком». Это дает возможность комбинировать оба способа – вначале аналитически строить структуру модели и определять начальные приближенные значения параметров, а далее обработкой экспериментальных данных уточнять их значения.
1.4. Особенности структурных моделей систем управления
Особенностью математических моделей систем управления является то, что они не только содержат априорную информацию о ее динамических свойствах, необходимую для изучения поведения системы в целом, но также отражают процессы получения и обработки текущей информации о цели системы, состоянии объекта и воздействиях среды для принятия решения по оказанию на объект надлежащего управляющего воздействия. Поскольку модели элементов и систем являются основным материалом в задачах анализа и синтеза (исходными данными и результатами), то им и алгоритмам их преобразования в теории управления отводят важное место.
Понятие модели системы управления неотделимо от понятия структуры. Под структурой систем управления понимают причинно-следственные взаимосвязи элементов (подсистем ) направленного действия . Именно ориентированность элементов и их взаимосвязей отличает модели систем управления от структурных моделей физических систем.
При построении моделей с раскрытой причинно-следственной структурой объект или систему предварительно расчленяют на элементы направленного действия и рассматривают их как преобразователи сигналов. Элементы выделяются, как правило, по функциональному признаку, причем сами эти функции понимаются в контексте операций управления: объект управления; измерительные, преобразовательные и усилительные элементы; управляющее устройство; исполнительный механизм; управляющий орган. Далее для каждой части строится своя модель, а затем модели частей связывают между собой таким же образом, как соединялись сами части.
Если части системы образуют контуры, то моделирование по частям встречается с принципиальной проблемой: не зная свойств частей, нельзя описать сигналы на их входах; не зная сигналов, нельзя правильно идентифицировать отдельные части. Достоинство моделирования по частям заключается в наглядности механизма преобразования входов в выходы.
2. Линейные модели и характеристики систем управления
2.1 Модели вход-выход
Основными формами представления конечномерных линейных непрерывных стационарных детерминированных операторов преобразования входных переменных f (t ) в переменные выхода y (t ) являются: дифференциальные уравнения, передаточные функции, временные и частотные характеристики. Для одномерных систем переменные f (t ) и y (t ) являются скалярами. Эти и некоторые другие представления операторов рассматриваемого класса моделей могут быть приняты за основу задания динамических свойств в терминах вход-выход. Если для конкретных исследований та или иная форма оказывается более предпочтительной, ставится и решается задача перехода от одной формы к другой, например задача построения временных и частотных характеристик по дифференциальному уравнению или передаточной функции.
Обыкновенное линейное дифференциальное уравнение n -порядка с постоянными коэффициентами обычно записывается так:
![]() (1)
(1)
Если ввести оператор дифференцирования по времени ![]() , то уравнение (1) запишется в компактном виде:
, то уравнение (1) запишется в компактном виде:
A (p )y (t ) = B (p )f (t ), (2)
где A (p ) = an pn + …… + a 1 p + a 0 ; B (p ) = bm pm + …… + b 1 p + b 0 – операторные полиномы. Дифференциальное уравнение дополняется начальными условиями ![]() .
.
Передаточная функция равна отношению изображений по Лапласу переменных выхода и входа при нулевых начальных условиях W (s )=Y (s )/F (s ), где интегральное преобразование Лапласа определяется так:
![]()
![]()
Преобразуя дифференциальное уравнение (1) при нулевых начальных условиях, получаем алгебраическое уравнение для изображений:
A (s )Y (s ) = B (s )F (s ).
Отсюда следует, что передаточная функция легко записывается по дифференциальному уравнению
W (s ) = B (s )/A (s ) (3)