Учебное пособие: Математическое моделирование и расчет систем управления техническими объектами
Зная передаточную функцию и изображение переменной входа, легко найти изображение выхода
Y (s ) = W (s )F (s ).
Пример. Пусть система описывается дифференциальным уравнением второго порядка:
![]()
Преобразуем это уравнение по Лапласу, для чего воспользуемся свойством линейности оператора преобразования L , а также теоремой о дифференцировании оригинала:
![]() a 2 (s 2 Y (s ) – sy (0) – y ¢(0)) + a 1 (sY (s ) – y (0)) + a 0 Y (s ) = b 0 F (s ).
a 2 (s 2 Y (s ) – sy (0) – y ¢(0)) + a 1 (sY (s ) – y (0)) + a 0 Y (s ) = b 0 F (s ).
Последнее уравнение перепишем в следующем виде:
(a 2 s 2 + a 1 s + a 0 )Y (s ) = b 0 F (s ) + a 2 sy (0) + a 2 y '(0) + a 1 y (0).
При нулевых начальных условиях y (0) = y '(0) = 0 отношение изображений, т.е. передаточная функция
![]()
Оператор, связывающий вход и выход, можно задать коэффициентом и множествами нулей (корней полинома) zj ; j = 1, …, m и полюсов (корней полинома знаменателя) pi ; i = 1, …, n. Передаточная функция будет равна:
![]() (4)
(4)
В отличие от полиномиальной формы (3) форму задания передаточных функций (4) иногда называют факторизованной.
Вводится понятие структуры оператора преобразования. Для дифференциального уравнения n -го порядка (1) и передаточной функции (3) задание структуры означает задание целых чисел – степеней n = deg A и m = deg B – полиномов А и В .
Параметрамиоператора являются коэффициенты полиномов.
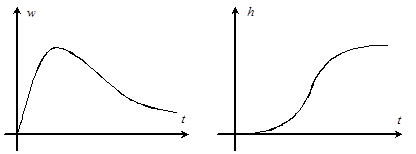
Временные характеристики являются одной из форм представления операторов преобразования переменной f (t ) в переменную y (t ). Импульсная переходная функция, или функция веса w (t ) – реакция системы на единичный идеальный импульс (рис.4, а ) ![]() при нулевых начальных условиях. переменная выхода определяется как интеграл свертки:
при нулевых начальных условиях. переменная выхода определяется как интеграл свертки:
![]() (5)
(5)
т.е. в этом случае оператор преобразования имеет форму интегрального уравнения.
Другая часто употребляемая временная характеристика – переходная (рис.4, б ) характеристика h (t ) – реакция системы на единичную ступенчатую функцию1(t ) при нулевых начальных условиях. На рис.4 приведен примерный вид временных характеристик для системы второго порядка.
Частотные характеристики элементов и систем представляют собой зависимость параметров установившихся реакций на гармонические сигналы всех частот и единичных амплитуд. В линейных системах форма и частота установившейся реакции совпадают с входом. Комплексная частотная характеристика W (![]() ) дает возможность определить амплитуду
) дает возможность определить амплитуду ![]() и фазу
и фазу ![]() гармонического сигнала на выходе системы по значению частоты:
гармонического сигнала на выходе системы по значению частоты:
![]()
![]() (6)
(6)
где ![]() и j(w)== argW (j w) – амплитудная и фазовая частотные характеристики;
и j(w)== argW (j w) – амплитудная и фазовая частотные характеристики; ![]() , и
, и ![]() – вещественная и мнимая частотные характеристики.
– вещественная и мнимая частотные характеристики.
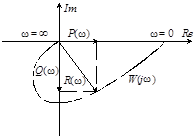
На рис.5. изображен пример годографа W![]() , называемого амплитудно-фазовой характеристикой (АФХ). Реальные объекты с повышением частоты хуже пропускают сигналы – ослабляют амплитуду и вносят отрицательный фазовый сдвиг.
, называемого амплитудно-фазовой характеристикой (АФХ). Реальные объекты с повышением частоты хуже пропускают сигналы – ослабляют амплитуду и вносят отрицательный фазовый сдвиг.
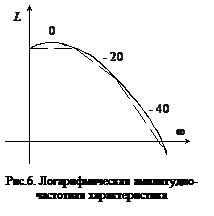
Амплитудно-частотные характеристики удобно представлять в логарифмическом масштабе: ![]() Если частота изменяется в логарифмическом масштабе, то логарифмические амплитудно-частотные характеристики (ЛАЧХ) во многих практически важных случаях мало отличаются от прямолинейных асимптот с наклонами, кратными 20 дБ/дек. На рис.6 приведен примерный вид асимптотической ЛАЧХ; штриховая кривая – точная ЛАЧХ. Там же указаны наклоны асимптот в децибелах на декаду.
Если частота изменяется в логарифмическом масштабе, то логарифмические амплитудно-частотные характеристики (ЛАЧХ) во многих практически важных случаях мало отличаются от прямолинейных асимптот с наклонами, кратными 20 дБ/дек. На рис.6 приведен примерный вид асимптотической ЛАЧХ; штриховая кривая – точная ЛАЧХ. Там же указаны наклоны асимптот в децибелах на декаду.
Хотя за основу задания динамических свойств систем может быть принята любая из форм представления операторов, для конкретных исследований та или иная форма оказывается более рациональной и возникает необходимость перехода от одной формы к другой. Многие задачи анализа связаны с преобразованием формы представления оператора. В ряде случаев эта процедура составляет наиболее трудоемкий этап анализа – построение частной модели, т.е. приведение к форме, позволяющей непосредственно вычислить показатели качества и вывести суждение о соответствии поведения системы заданным требованиям (например, построение временных или частотных характеристик системы управления).
|
Наиболее прост формальный переход путем замены оператора дифференцирования ![]() на комплексный аргумент s от дифференциального уравнения (2) к передаточной функции (3) и обратно. Осуществляя переход к передаточным функциям, следует избегать сокращения общих делителей полиномов числителей и знаменателей, т.е. диполей рациональных функций. Такое сокращение при водит к потере части собственных составляющих движения при ненулевых предначальных условиях (составляющих свободных движений).
на комплексный аргумент s от дифференциального уравнения (2) к передаточной функции (3) и обратно. Осуществляя переход к передаточным функциям, следует избегать сокращения общих делителей полиномов числителей и знаменателей, т.е. диполей рациональных функций. Такое сокращение при водит к потере части собственных составляющих движения при ненулевых предначальных условиях (составляющих свободных движений).