Учебное пособие: Методические указания по выполнению курсовой работы Составитель : Пономарев Б. Б. Иркутск, 1995 г
VMy - 2w3z ´r3 ´cosj3 - w3z ´r3 ´sinj3 =0
2w3z ´r3 ´sinj3 - w3z ´r3 ´cosj3 +0,5´w4z ´r3 =0 (19)
- 0,5´w4z ´r3 +w3z ´r3 ´cosj3 +w2z ´r2 ´sinj2 +w1z ´r1 ´sinj1 =0
w3z ´r3 ´sinj3 - w2z ´r2 ´cosj2 - w1z ´r1 ´cosj1 =0
Система уравнений (19) может быть разрешена относительно wiz :
|
|
![]()
![]()
|
|
w4z =2w3z (cosj3 - 2sinj3 ) (20) ![]()
![]()
![]()
![]()
![]()
|
|
Дополним (20) уравнениями:
![]() ;
; ![]()
![]() (21)
(21)
Уравнения (20) и (21) образуют систему дифференциальных уравнений, интегрирование которой при заданных начальных значениях j1 (0), j2 (0), j3 (0) решает задачу о движении механизма при заданном движении точки М.
3. Решение задачи и обработка результатов . Вычисления могут проводиться с использованием конечно-разностной схемы Эйлера, позволяющей связать значения углов и угловых скоростей в начале и конце k-го шага интегрирования :
j1 (k+1) =j1 (k) +w1z (k) ´Dt;
j2 (k+1) =j2 (k) +w2z (k) ´Dt; (22)
j3 (k+1) =j3 (k) +w3z (k) ´Dt.
Программа счета составляется на любом языке программирования, результаты оформляются с помощью программы в виде таблицы. По результатам решения строятся графики w1z (t), w2z (t), w3z (t), w4z (t), которые не должны иметь разрыва и иметь явно выраженный синусоидальный характер.
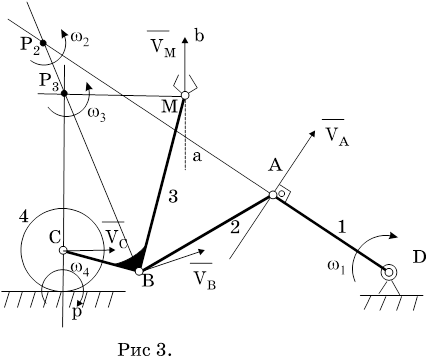
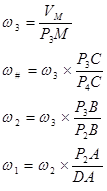
4. Графическая проверка . Извлекаются из таблицы счета значения углов поворота звеньев из строки под номером (N+2). Механизм строится в масштабе 1:10, определяется положение мгновенных центров скоростей (рис. 3). Строятся векторы скоростей точек A, B, C, M и указываются дужками направления вращения звеньев. По известным значениям скоростей и расстояниям до мгновенных центров скоростей определяются значения угловых скоростей звеньев.
|
|
Результаты, полученные с помощью графических построений, должны быть близки к результатам рещения задачи на ЭВМ и не должны отличаться более чем на 5%.
II. Кинематика управляемого движения манипулятора.
Описание задания.
Манипулятор (рис.1), имеющий две системы свободы позволяет, при срабатывании приводов, захвату, точке М, осуществлять движение в плоскости по двум координатам и при определенных условиях совместить захват с двигающейся деталью,точкой К. Деталь К движется с постоянной скоростью Vк в указанном на рисунке направлении. Координаты точки К изменяются по закону:
XK =XK (0)+VKx ´ t; YK =YK (0)+VKy ´ t. (23)
Управление движением захвата М осуществляется по линейной комбинации рассогласований координат точек К и М, а также их производных. Рассогласование координат точек К и М в момент времени t=t2 должно составлять величину d от начальных рассогласований.
Исходные данные определяются формулами (24) и табл. 1
r1 =r1T +0,001n, ri =riT +0,001N