Учебное пособие: Методические указания по выполнению курсовой работы Составитель : Пономарев Б. Б. Иркутск, 1995 г
![]() M =VMx (XM ,t);
M =VMx (XM ,t); ![]() M =VMy (YM ,t); (31)
M =VMy (YM ,t); (31)
![]() i =wiz (ji , Vmx , Vmy , t) (i=1,2,3)
i =wiz (ji , Vmx , Vmy , t) (i=1,2,3)
Эти уравнения манипулятора,являющегося системой с двумя степенями свободы, записаны в избыточном наборе пяти переменных XM , YM , j1 , j2 , j3 . Отсюда следует, что из начальных значений этих переменных независимо могут задаваться только два. В таблице 1 независимыми задаются величины j1 (0), j2 (0), значения j3 (0) указанные в таблице,вычислены по j1 (0), j2 (0) для рассматриеваемой конструктивной схемы манипулятора. Значения XM (0), YM (0) следует находить по заданным j1 (0), j2 (0), j3 (0).
Указания к решению задачи. Дифференциальные уравнения движения манипулятора с заданными начальными условиями интегрируются на интервале времени [ 0, t2 ] с шагом Dt. При решении задачи рекомендуется использовать конечноразностную схему Эйлера.
Контроль решения. Построенные по результатам счета графики не должны иметь разрывов. При t=t2 рассогласование между точками М и К должно быть величиной порядка d от начального. Результаты вычисления на ЭВМ для момента времени t=(N+1)´Dt угловых скоростей звеньев и скорости точки С должны совпадать с результатами графоаналитического решения для этого момента времени. Расхождения не должны превышать 5%.
Пример выполнения задания .
(вариант 31, n=1, N=2)
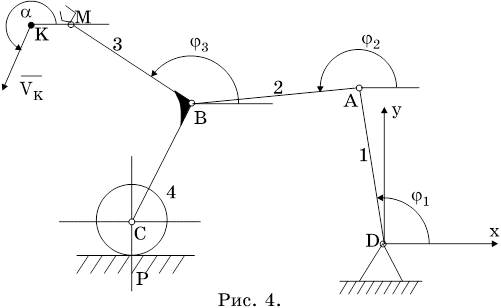
1. Постановка задачи. Управление манипулятором (рис.4) должно обеспечить за время t2 сближение захвата М с движущейся деталью К. Деталь движется прямолинейно с постоянной скоростью Vк в указанном на рисунке направлении. Начальное положение манипулятора задано углами поворота звеньев j1 (0), j2 (0), j3 (0). К моменту времени t=t2 требуется относительная точность d совмещения точек М и К. Управление манипулятором осуществляется по линейной комбинации рассогласований и их производных.
Дано: Vk =0,304м/c; a=4,35рад; DA=r1 =0,953м; BC=r3 =0,457м; BM=2r3 ; AB=r2 =0,847м; j1 (0)=1.63рад; j2 (0)=3,37рад; j3 (0)=2,87рад; Xk (0)=-2,16м; Yk =1,18м; d=0,01; t2 =1,37c; Dt=0,057c.
Требуется: 1. Составить уравнения управляемого движения точки М, уравнения углового движения звеньев манипулятора и уравнения для скорости точки С. 2. Выбрать параметры управления, обеспечивающего сближение точек М и К с заданной точностью. 3. Проинтегрировать с помощью ЭВМ уравнения движения на интервале времени [ 0, t2 ]. 4. Построить траектории сближения точек М и К и графики j1 (t), w1z (t), Vcx (t). 5. Для момента времени t=(N+1)Dt=0,456c провести графоаналитическое решение задачи и сравнить с результатами счета.
2. Составление уравнений движения. Уравнения движения детали К имеют вид:
Xk =Xk (0)+Vkx ´t; Vkx =Vk cosa= - 0,108м/c; (32)
Yk =Yk (0)+Vky ´t; Vky =Vk sina= - 0,284м/c.
Предполагая,что координаты захвата М известны в процессе движения,можно вычислить рассогласования координат точек К и М.
DX=Xk - XM; DY=Yk - YM (33)
Учитывая,что управление манипулятором осуществляется по линейной комбинации рассогласовании и их производных
ux =DX + T* ![]() DX; uy =DY + T*
DX; uy =DY + T* ![]() DY (34)
DY (34)
При управлении с большими коэффициентами усиления k с погрешностью порядка 1/k выполняются соотношения:
ux =0, uy =0. (35)
Подставляя (35) в выражения (32), (33), (34) и приводя полученные уравнения к форме Коши получаем:
![]() =VMx ; VMx =Vkx + [Xk (0) + Vkx ´t - XM ] / T* ;
=VMx ; VMx =Vkx + [Xk (0) + Vkx ´t - XM ] / T* ;
![]() =VMy ; VMy =Vky + [Yk (0) + Vky ´t - YM ]/T* . (36)
=VMy ; VMy =Vky + [Yk (0) + Vky ´t - YM ]/T* . (36)
Угловое движение звеньев манипулятора и скорость точки С однозначно определяется движением точки М и внешними связями, налагаемыми в точках D и С. Составляются выражения для проекций скоростей точек С и М.
В соответствии с графом С![]() В
В![]() М запишем:
М запишем:
VMx =Vcx - w3z ´r3 ´sin(j3 - ![]() ) - w3z ´2r3 ´sinj3 ;
) - w3z ´2r3 ´sinj3 ;
Vmy =w3z ´r3 ´cos(j3 - ![]() ) + w3z ´2r3 ´cosj3 ; (37)
) + w3z ´2r3 ´cosj3 ; (37)
В соответствии с графом D![]() A
A![]() B
B![]() C
C
Vcx = - w1z ´r1 ´sinj1 - w2z ´r2 ´sinj2 - w3z ´r3 ´sin(j3 + ![]() ); (38)
); (38)