Дипломная работа: Проектирование привода горизонтального канала наведения и стабилизации ОЭС
33,5
14,5
15,0
1,0
1,0
2,0
3) Сигнал по частоте вращения ротора - 12-ти разрядный код, преобразованный в аналоговый сигнал. Крутизна сигнала 12 В на 20 об./мин.
Частота обновления информации 1 кГц. Оконечное устройство обеспечивает сопряжение электрической аппаратуры БОСДУ электродвигателя по цифровому каналу с ЦВС комплекса, выполняет адресованные ему команды ЦВС и осуществляет контроль принимаемой информации. ОУ - является устройством интерфейса по ГОСТ 26765,52 - 87.
Надежность:
· наработка на отказ более 20000 часов.
· ресурс работы 30000 часов.
· срок службы 25 лет.
Технико - экономические требования:
Предприятие изготовитель ВНИИМЭМ(г. Санкт- Петербург).
Ориентировочная годовая потребность 40 шт. в течение 4-х лет начиная с 1999 г. Цена серийного образца 3000 у.е.
7. Расчет зон работы следящего привода
Пространственная область применения следящих приводов может быть оценена путем построения зон предельных скоростей и ускорений приводов. Пространство внутри зоны является запретным.
Наглядное представление о зоне дает изометрическая проекция, построенная в трехмерном координатном пространстве (H, P, Dс), но чаще всего строят вертикальные и горизонтальные сечения зон. Вертикальное сечение представляет собой проекцию пространственной зоны на координатную плоскость (Н, Dс), вычисленную в предположении Р = const , Vо = const, Н = var, Dс = var.
Горизонтальное сечение представляет собой проекцию пространственной зоны на координатную плоскость (Р, Dс), вычисленную в предположении Н = const, Vо = const, Р = var, Dс = var. Диапазоны изменения Vо, Р, Н, Dс задаются техническим заданием.
В качестве предельных значений скоростей и ускорений могут рассматриваться максимальные располагаемые характеристики, рассчитанные по формулам (4.4), (4.5) или определенные по графикам (см. рисунок 4.1).
Перепишем формулы расчета кинематических характеристик горизонтального канала (4.2) и (4.3) в следующем виде:
 (7.1)
(7.1)
 (7.2)
(7.2)
Если в левых частях формул (7.1) и (7.2) текущие значения ![]() и
и ![]() заменить их предельными значениями
заменить их предельными значениями ![]() МАКС и
МАКС и ![]() МАКС (см. пункт 4), то получим выражения для запретных зон по скоростям и ускорениям, которые представляют собой решения нелинейных алгебраических уравнений.
МАКС (см. пункт 4), то получим выражения для запретных зон по скоростям и ускорениям, которые представляют собой решения нелинейных алгебраических уравнений.
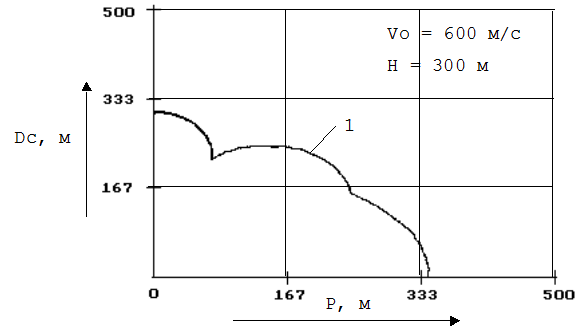
Используя метод последовательных итераций решим эти уравнения с учетом ограничений по предельным значениям скорости и ускорения наведения горизонтального канала привода, предъявленные техническим заданием (см. тех. задание и пункт 1). Решение уравнений представляют собой зоны работы горизонтального канала следящего привода, изображенную на рисунке 7.1.
 |
???? ?????? ??????????????? ?????? ????????? ???????
1 – запретная зона горизонтального канала
по скорости и ускорению
Рисунок 7.1.
8. Определение параметров математической модели двигателя
Используя параметры двигателя из базы данных, определим параметры матмодели:
· скорость холостого хода