Дипломная работа: Проектирование привода горизонтального канала наведения и стабилизации ОЭС
· сопротивление цепи статора
RC =UНОМ /IНОМ (8.11)
· индуктивность цепи статора
![]() (8.12)
(8.12)
Упрощенная схема матмодели двигателя постоянного тока может быть представлена структурной схемой:
Структурная схема двигателя.
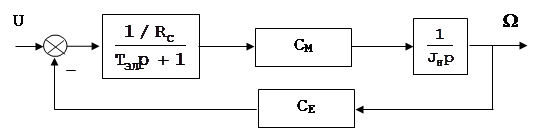 |
Рисунок 8.3.
В результате проведенных выше расчетов получены следующие данные (см. таблицу 8.1.).
Результаты экспериментальных замеров параметров электродвигателя представлены в приложении 1.
Используя параметры математической модели двигателя и теорию замкнутых систем, изложенную в литературе [3,4,5], найдем передаточную функцию ЭДВ без нагрузки.
 , (8.13)
, (8.13)
 , (8.14)
, (8.14)
где WДВБН (р)- передаточная функция ЭДВ без нагрузки;
р = i×w , i=![]() .
.
Построим для передаточной функции двигателя логарифми-ческие амплитудную и фазовую частотные характеристики (ЛАЧХ и ЛФЧХ), по методике изложенной в литературе [3].
LДВБН (w)= 20×lg(|WДВБН (р)|), (8.15)
где LДВБН (w)- логарифмическая амплитудная частотная характе-ристика двигателя под нагрузкой.
jДВБН (w)= arg(WДВБН (р)), (8.16)
где jДВБН (w)- логарифмическая фазовая частотная характерис-тика двигателя под нагрузкой.
Таблица 8.1.
Параметры матмодели ЭДВ
| № | Параметр | Значение | |
| без нагрузки | с нагрузкой | ||
| 1 | Тм, мс | 1,745 | 141,000 |
| 2 | Jдв, кгм2 | 0,100 | 8,100 |
| 3 | Wхх, рад/с | 4,189 | |
| 4 | См, Вс | 6,000 | |
| 5 | Се, Вс | 13,608 | |
| 6 | Рэ, Вт | 1140,000 | |
| 7 | Рном, Вт | 251,327 | |
| 8 | Рмакс, Вт | 251,327 | |
| 9 | Lc, Гн | 0,014 | |
| 10 | Rc, Ом | 1,425 | |
Логарифмические амплитудная и фазовая частотные характеристики двигателя под нагрузкой представлены на рисунке 8.4.
Логарифмические амплитудная и фазовая частотные характеристики двигателя без нагрузки.
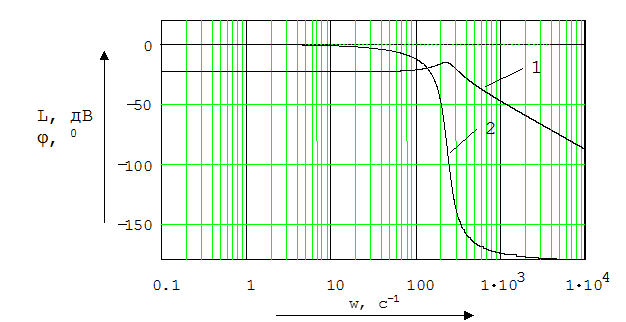
1 – Логарифмические амплитудная частотная характерис-тика LДВБН , дВ;
2 - Логарифмические фазовая частотная характеристика jДВБН , 0 .
Рисунок 8.4.
9. Формирование скоростного контура привода ГН
Проектирование замкнутого по скорости привода подразумевает выбор усилительных устройств, корректирующих и сглаживающих устройств, обеспечивающих наилучшие динамические характеристики (точность, диапазон регулирования, неравномерность движения на малых скоростях).
Пользуясь теоретическими положениями, описанными в литературе [1,7], разработаем структурную и функциональную схемы скоростного контура привода горизонтального наведения и стабилизации ОЭС.