Контрольная работа: Методы оптимизации при решении уравнений
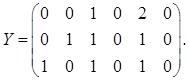
Y = (B, AB, A2 B):
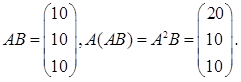
Таким образом
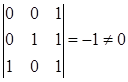
Взяв минор из 1,2 и 3 столбцов можно видеть, что
 .
.
Следовательно, rang(Y)=3=n и система вполне управляема.
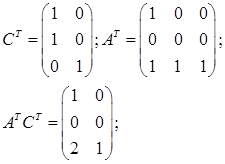
Для оценки наблюдаемости системы составим матрицу наблюдаемости (n=3):
H=(CT , AT CT , (AT )2 CT );
 .
.
Таким образом
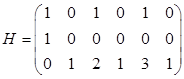
Взяв минор из 1, 2 и 3 столбцов можно видеть, что
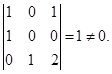
Таким образом rang(H) = 3 = n, а следовательно система вполне наблюдаема.
Задание №7
Для линейной системы ![]() и квадратичного критерия
и квадратичного критерия
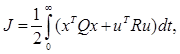
выполнить синтез оптимального управления с обратной связью
| A | B | Q | R |
|
0 1 1 0 |
1 0 |
1 0 0 0 | 1 |
Решение: Требуется выполнить синтез стационарного регулятора. Для этого воспользоваться алгебраическим матричным уравнением Риккати:
![]()
где