Курсовая работа: Анализ работы плоского рычажного механизма
Схема № 5
Вариант № 5
Положение механизма № 3
| № | Параметры | Значение |
| 1. | Частота вращения n, об/м | 850 |
| 2. | lAB , мм | 34 |
| 3. | lAС , мм | 90 |
| 4. | lEF , мм | 110 |
| 5. | lCD , мм | 60 |
| 6. | lAE , мм | 60 |
| 7. | Центры тяжести S1 , S2 ,S3 , S4 ,S5 расположены посередине соответствующих звеньев | |
| 8. | Расcтояние а, мм | 40 |
| 9. | Расстояние b, мм | 75 |
| 10. | Расcтояние c, мм | 80 |
| 11. | Вес ползуна, Н | 18 |
| 12. | Момент инерции звена | J = ml2 / 12 |
| 13. | Наибольшая сила сопротивления P, кH | 300 |
| 14. | Масса звеньев m=ql, q=0.1 кг/м | |
1. ДИНАМИЧЕСКИЙ АНАЛИЗ МЕХАНИЗМА
1.1 СТРУКТУРНЫЙ АНАЛИЗ МЕХАНИЗМА
1.1.1 СТРУКТУРНАЯ СХЕМА МЕХАНИЗМА
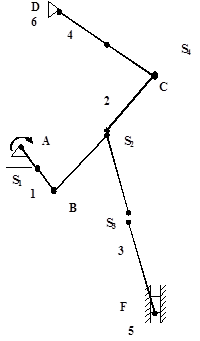
Рисунок 1.1. - Кинематическая схема механизма
Для изучения движения механизма необходимо знать его структуру: количество звеньев, количество и классы кинематических пар. Необходимыми также являются знания о взаимном расположении звеньев. Поэтому первым этапом кинематического анализа является построение кинематической схемы механизма. В данной курсовой работе рассмотрен механизм схемы № 5. Её построение выполнено в масштабе μl = 0,001 м .
Определить характер движения звеньев механизма можно с помощью плана положений. Построения плана начинается с черчения неподвижных опор B и D. Дальше строится траектория движения ведущего звена АВ (окружность) и на ней отмечаются двенадцать положений звена АС через каждые 300 , начиная с того положения, которое соответствует самому верхнему положению ползуна, которое мы и принимаем за нулевое. По условию необходимо рассмотреть данный механизм в положении № 3. Кинематическая схема механизма приведена в заданном положении на рисунке 1.1.
1.1.2 ПЕРЕЧИСЛЕНИЕ ЗВЕНЬЕВ МЕХАНИЗМА
Рассмотрев характер движения, в механизме можно выделить следующие звенья:
1. - кривошип;
2. - шатун;
3. - коромысло;
4. - кривошип;
5. - ползун;
6. - стойка;
7. - стойка;
Звенья механизма соединены кинематическими парами:
1-2 - кинематическая пара 5-го класса, вращательная;
2-3 - кинематическая пара 5-го класса, вращательная;
2-4 - кинематическая пара 5-го класса, вращательная;
3-5 - кинематическая пара 5-го класса, вращательная;
6-1 - кинематическая пара 5-го класса, вращательная;
7-4 - кинематическая пара 5-го класса, вращательная;
3-5 - кинематическая пара 5-го класса, поступательная.
1.1.3 ОПРЕДЕЛЕНИЕ СТЕПЕНИ ПОДВИЖНОСТИ МЕХАНИЗМА
Разбиваем механизм на группы Ассура. Это показано на рисунке 1.2. Степень подвижности механизма определяем по уравнению Чебышева:
W = 3 n - 2 p 5 - p 4 (1.1.1),