Курсовая работа: Анализ работы плоского рычажного механизма
p5, p4 - количество кинематических пар 4-го и 5-го класса.
Для данного механизма количество подвижных звеньев n = 5, кинематических пар 5-го класса p5 = 7; кинематические пары 4-го класса отсутствуют p4 = 0.
W = 3·5 - 2·7 = 1
Так как степень подвижности механизма равна 1, то для работы данного механизма необходимо одно ведущее звено.
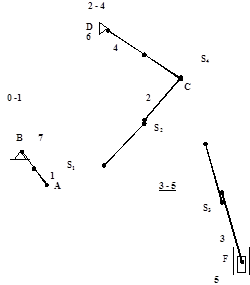
Рисунок 1.2. - Структурные группы механизма
1.2 Кинематический анализ механизма
1.2.1 Определение скоростей точек и звеньев механизма
Для определения скоростей точек и звеньев заданного механизма воспользуемся методом планов скоростей.
Планом скоростей называется диаграмма, на которой изображены векторы скоростей точек плоского механизма.
Определим угловую скорость w ведущего звена АВ по формуле:
w = 2π · n /60 = 2 · 3,14 · 850 / 60 = 89 c -1 (1.2.1),
где n - частота вращения.
Построение планов скоростей начинаем со скорости точки А ведущего звена АB . Учитывая, что угловая скорость ведущего звена w известна, скорость точки А определим из уравнения :
VА = w AB × l AB = 89 × 0,034 = 3,026 м/ c -1 (1.2.2),
гдеl AB – длина звена АB м .
На плоскости черчения определяем полюс Pv , в котором будут находится точки B иD - неподвижные опоры данного механизма. Из полюса проводим вектор а в общем случаепроизвольной длины, а для конкретно данной задачи а = 151,3 мм ,который отвечает скорости VА , в направлении перпендикулярном положению звена АВ вдоль w AB . Вычислим масштабный коэффициент µ v по формуле:
µ v = VА / Pv a = 3,026 : 151,3 = 0,02 м/ мм × с (1.2.3),
где VА - скорость точки А м/с ;
Pv a - длина вектора на плане скоростей мм .
Для определения скорости точки C воспользуемся условием её принадлежности звену – АС и DC .Скорость точки С определяется из системы векторных уравнений:
![]()
Вектор скорости точки В будет результатом общего решения двух векторных уравнений . В уравнении (1.2.4) первая составляющая VA известна по направлению, а про скорость VC A известно лишь то, что она перпендикулярна звену СА. Потому для дальнейшего построения рядом с точкой а проводится линия, которая перпендикулярна AC .
Абсолютное значение скорости VC определяется из уравнения:
VC = Pv с · µ v = 152 · 0,02 = 3,04 м/с (1.2.6),
где Pv с - длина вектора мм.
Соединим на плане скоростей векторы a и с. Этот вектори является вектором ас , который соответствует звену АС на плане механизма. Т.к. точка Е принадлежит вектору АС , а соответственно и вектору ас на плане скоростей, то для нахождения ее положения на векторе ас будет справедливо:
l АС / l ЕС = ас / ес (1.2.7),
ес = 30 · 12 / 90 = 4 мм .
где lЕС - длина звена ЕС;