Курсовая работа: Автоматическая система регулирования с П-регулятором
Рассчитаем значение коэффициента передачи при 10 % по формуле:
где ![]() - максимальное установившееся значение сигнала.
- максимальное установившееся значение сигнала.
![]() - минимальное значение сигнала.
- минимальное значение сигнала.
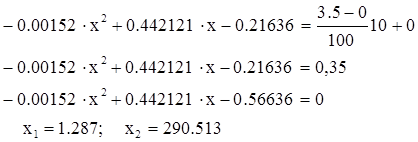
Подставляя полученные данные, получим:
![]()
Выбираем х1, т.к только он входит в диапазон экспериментальных значений. Подставим значение х1 в (1.2) и получим значение коэффициента передачи при 10 % номинального режима:
Рассчитаем значение коэффициента передачи при 50 % по формуле:

Подставляя полученные данные, получим:
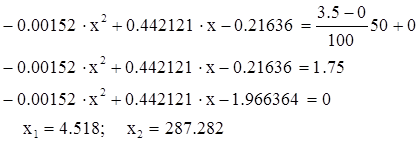
Выбираем х1 , т. к только он входит в диапазон экспериментальных значений. Подставим значение х1 в (1.2) и получим значение коэффициента передачи при 50 % номинального режима:
![]()

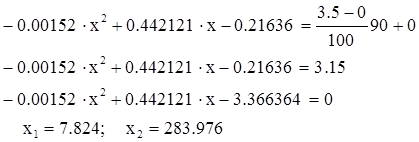
Рассчитаем значение коэффициента передачи при 90 % по формуле:
![]()
Выбираем х1 , т. к только он входит в диапазон экспериментальных значений. Подставим значение х1 в (1.2) и получим значение коэффициента передачи при 90 % номинального режима:
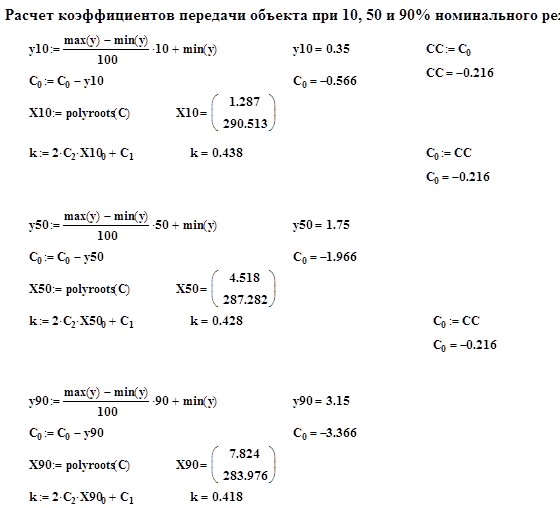
Результаты расчета сведены в таблицу.
Таблица 4
Коэффициенты передачи.
| 10% | 50% | 90% | |
| х | 1.287 | 4.518 | 7.824 |
| к | 0.438 | 0.428 | 0.418 |
Ниже приведен проверочный расчет коэффициентов передачи объекта на ЭВМ в системе MathCad.
2. Динамическая модель объекта
2.1 Постановка задачи
Динамическая модель связывает изменение входных и выходных величин во времени, то есть отражает протекание переходного процесса.
Для получения динамической характеристики объекта регулирования необходимо выполнить следующие действия:
- задаться рядом значений времени t ;
- подав на вход объекта возмущение, для каждого t i зарегистрировать значение выходного сигнала y i .
Полученная, таким образом, динамическая характеристика заданного объекта регулирования, приведена в табл. 5.