Курсовая работа: Автоматическая система регулирования с П-регулятором
2.3 Модель объекта первого порядка с запаздыванием
Динамическая модель первого порядка с запаздыванием представляет собой неоднородное дифференциальное уравнение первого порядка:
![]() (2.4)
(2.4)
где T - постоянная времени объекта;
k - коэффициент передачи при 50% номинального режима;
![]() - время запаздывания.
- время запаздывания.
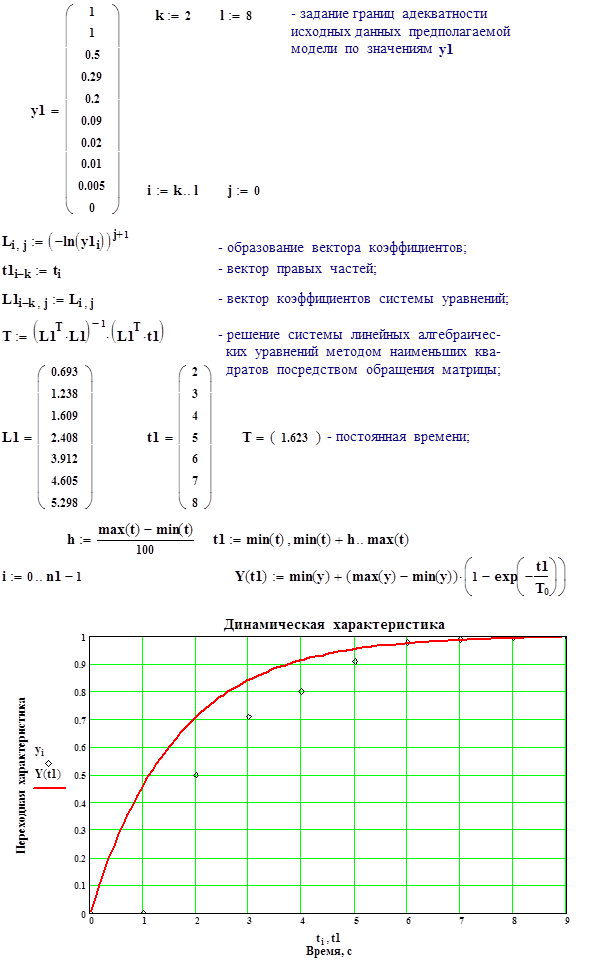
Решением уравнения (2.1) будет экспоненциальная зависимость сигнала на выходе от времени:
![]() (2.5)
(2.5)
где y0 =0 - начальное состояние выхода объекта;
k. x=yуст. =10 - установившееся состояние выхода объекта.
Проведем преобразования, аналогичные модели без запаздывания
![]()
или запишем в виде системы :
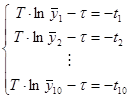 (2.6)
(2.6)
где ![]() берется из табл. 7.
берется из табл. 7.
Так как ![]() ,
, ![]() и
и ![]() , то все уравнения содержащие эти элементы в расчете участвовать не будут.
, то все уравнения содержащие эти элементы в расчете участвовать не будут.
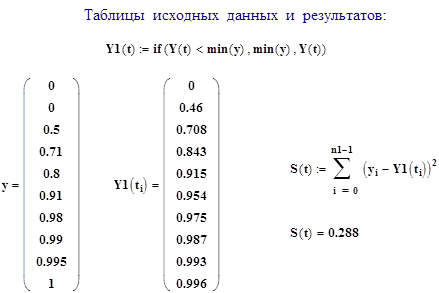
Решим систему (2.6) методом наименьших квадратов. Составим матрицы:
- искомых величин: ![]()
- правой части системы: 
- левой части системы: 
- произведение 
- произведение 
Таким образом получили матричное уравнение:
![]()
Находим главный определитель:
![]()
Подставляя матрицу ![]() поочередно в первый и второй столбец матрицы
поочередно в первый и второй столбец матрицы ![]() , находим вспомогательные определители:
, находим вспомогательные определители:
![]()