Курсовая работа: Дифференциальное уравнение относительного движения механической системы
![]()
![]()
![]()
Подставив производные левой части уравнений (2.1.1) и обобщенные силы ![]() и
и ![]() в уравнения (2.1.1), получим дифференциальные уравнения движения системы:
в уравнения (2.1.1), получим дифференциальные уравнения движения системы:

Для решения системы дифференциальных уравнений движения механической системы проведем численное интегрирование на ЭВМ. Результаты численного интегрирования приведены в приложении №2.
Для проверки численного интегрирования найдем, исходя из полученных данных, значения потенциальной и кинетической энергии механической системы. Суммируя значения потенциальной и кинетической энергии механической системы проверим, выполняется ли Закон сохранения энергии (см. приложение №2).
2.2 Определение реакций в опорах методом кинетостатики
Выберем для нашей системы неподвижную систему координат О1 X1 Y1 , (cм. рис.4).
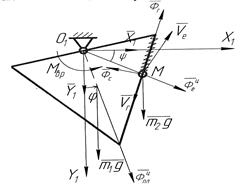
Рис.4. Силы, действующие на систему
Уравнения кинетостатики в векторной форме имеют вид
 (2.2.1)
(2.2.1)
где ![]() - главные векторы активных сил, реакций связей и сил инерции;
- главные векторы активных сил, реакций связей и сил инерции;
![]() - главные моменты активных сил, реакций связей и сил инерции относительно точки О1 .
- главные моменты активных сил, реакций связей и сил инерции относительно точки О1 .
Сила инерции шарика как материальной точки, совершающей сложное движение, равна геометрической сумме относительной, переносной и кориолисовой сил инерции:
![]()
![]() ,
,
![]()
Сила инерции пластины будет равна:
![]()
Модули сил инерции равны
![]() ,
, ![]() ,
, ![]()
![]() (2.2.2)
(2.2.2)
Изобразим активные силы, реакции опоры и силы инерции, действующие на механическую систему (рис. 4). Векторные уравнения кинетостатики (2.2.1) в проекциях на оси неподвижной системы координат OX1 Y1 имеют вид
 (2.2.3)
(2.2.3)
C учётом выражений для сил инерции (2.2.2), уравнения (2.2.3) принимают вид
Найденные уравнения реакций шарнира и вращательного момента совпадают с теми, что были найдены в предыдущих частях курсовой работы.
3. Поведения системы в условиях малых колебаний
3.1 Положения равновесия механической системы и их устойчивость
Для определения положения равновесия механической системы воспользуемся выражением для потенциальной энергии системы, которое было выведено нами во втором разделе курсовой работы (см. п. 4):
![]() (3.1.1)
(3.1.1)