Курсовая работа: Исследование рычажного и зубчатого механизмов
Допущения:
1 Звенья механизма представляют собой абсолютно твердые тела.
2 Отсутствуют зазоры в кинематических парах.
Для решения задачи пользуемся методом векторных контуров. В этом методе связи в механизме, определяем как характером кинематических пар, так и размерами звеньев, выражаем в форме условий замкнутости векторных контуров, построенных на базе кинематической схемы механизма. В скалярной форме соответствующие зависимости получаем, проектируя контуры на оси координат.
Принимаем угол Ψ = 30о
 (1)
(1)
Аналоги скорости точки А:
 (2)
(2)
Аналоги ускорения точки А:
 (3)
(3)
1.2.2 Анализ группы Ассура II(2,3)
В данном подразделе определим зависимости ![]() и
и ![]() . Задачу решаем аналитически с использованием метода векторных контуров. Для получения зависимостей составляем векторные контуры. Углы отсчитываем от положительной оси Х против часовой стрелки, а для входного звена в направлении вращения.
. Задачу решаем аналитически с использованием метода векторных контуров. Для получения зависимостей составляем векторные контуры. Углы отсчитываем от положительной оси Х против часовой стрелки, а для входного звена в направлении вращения.
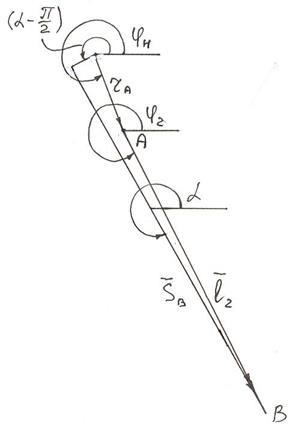
Рисунок 5 – Векторный контур ОАВК
Уравнение замкнутости векторного контура:
![]() (4
(4
Проецируем уравнение на оси системы координат:
 (5
(5
Умножить второе уравнение на ![]() , первое – на
, первое – на ![]() .
.
После вычитания первого уравнения из второго получим:
 (6
(6
Дифференцируем уравнения исходной системы по обобщенной координате:
 (7)
(7)
После преобразований находим:
- Аналог угловой скорости звена 2:
![]() (8)
(8)
- Аналог скорости точки В:
![]() (9)
(9)
Второй раз дифференцируем ту же систему: