Курсовая работа: Исследование систем автоматического управления (САУ)
Синтез последовательного корректирующего устройства выполним методом логарифмических характеристик.
В дальнейшем будем предполагать, что САУ состоит из измерительного устройства, исполнительного устройства и объекта управления с общей передаточной функцией W(S) и последовательного корректирующего устройства с передаточной функцией Wку(S).
При рассмотрении желаемой логарифмической частотной характеристики (ЖЛАЧХ) выделим четыре области:
а) область очень низких частот (0, ![]() ).
).
Наклон характеристики составляет — -20 дб/дек, по количеству интегрирующих звеньев;
б) область низких частот ( ![]() ,
,![]() ).
).
Наклон составляет - 40 дб/дек, по количеству апериодических звеньев с постоянной времени
 ;
;
в) область средних частот (![]() ,
,![]() ).
).
Наклон на частоте среза ![]() составляет – 20 дб/дек для обеспечения необходимых запасов устойчивости.
составляет – 20 дб/дек для обеспечения необходимых запасов устойчивости.
г) область высоких частот (![]() ,¥ ).
,¥ ).
Наклон существенно не влияет на качество САУ, поэтому выберем его по исходной ЛАЧХ.
Рассчитаем параметры ЖЛАЧХ:
 ;
; ![]() дб.
дб.
 с-1
с-1
 с-1
с-1
 с-1
с-1
По полученным данным и с учётом предъявляемых требований строим ЖЛАЧХ.
5.2 Выбор последовательного корректирующего устройства и расчет его параметров
Решим задачу синтеза последовательного корректирующего устройства. Для этого из ЖЛАЧХ геометрически вычтем ЛАЧХ не скорректированной системы. Полученная характеристика представляет собой ЛАЧХ корректирующего устройства.
По виду ЛАЧХ корректирующего устройства определим его передаточную функцию, схему и параметры. Приведенной ЛАЧХ корректирующего устройства соответствует ниже представленная схема:
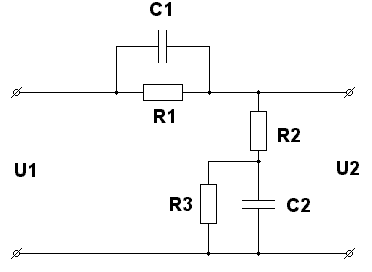
Рис. 4 Схема корректирующего устройства
![]() ;
; ![]() .
.
Передаточная функция устройства:
Wск(S) =  ;
;
где ![]() с;
с; ![]() с;
с; ![]() с;
с; ![]() с;
с;
kVск – коэффициент усиления скорректированной САУ;
kV – коэффициент усиления исходной САУ.