Курсовая работа: Кинематический и силовой расчет механизма
Всего 4
пятого класса p5 =4
Вывод – число подвижностей механизма W=1. Это означает, что механизм имеет только одно начальное звено – кривошип 1. Также это означает, что механизм имеет только одну степень свободы в движении относительно стойки и достаточно задать только одну обобщенную координату движения (например, угол поворота кривошипа относительно исходного положения), чтобы определить положение всех звеньев механизма относительно стойки в данный момент времени.
Таблица 2
| Разбиение на структурные группы и определение их класса и порядка | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||

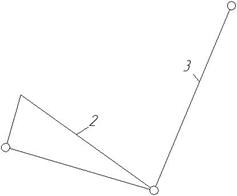
Заданный механизм состоит из ведущего звена 1 со стойкой 4 и двухповодковой группы (звенья 2 - 3). Звено 1 вращается, совершая полный оборот, и называется кривошипом. Звено 3 совершает вращательное движение с неполным оборотом и называется коромыслом. Звено 2 совершает сложное движение и образует кинематические пары с кривошипом 1 и коромыслом 3. Такое звено называется шатуном. Все кинематические пары вращательные V класса.
Таким образом, заданный механизм является плоским с одной степенью свободы и называется кривошипно-коромысловым.
Схему такого механизма можно использовать для резки пруткового материала.
2 Кинематический анализ механизма
Основными задачами кинематического исследования механизмов являются:
· определение положений звеньев
· определение скоростей и ускорений точек;
· определение угловых скоростей и ускорений звеньев.
Ведущее звено - кривошип и считаем его угловую скорость ![]() , рад/с постоянной. Исследования проводим графоаналитическими методами. Так, положения звеньев определяем методом засечек при построении плана механизма, скорости и ускорения различных точек механизма находим с помощью построения планов скоростей и ускорений.
, рад/с постоянной. Исследования проводим графоаналитическими методами. Так, положения звеньев определяем методом засечек при построении плана механизма, скорости и ускорения различных точек механизма находим с помощью построения планов скоростей и ускорений.
2.1 Построение планов механизма
Кинематическую схему строим методом засечек.
Выбираем масштаб построения с таким расчетом, чтобы планы положений механизма заняли примерно 1/5…1/4 часть площади формата А1 или полную площадь формата А4.
Выбираем точку О1 . Проводим окружность радиуса ![]() . Длину отрезка, изображающего звено О1 А выбираем произвольно из соображения размещения схемы механизма на листе выбранного формата.
. Длину отрезка, изображающего звено О1 А выбираем произвольно из соображения размещения схемы механизма на листе выбранного формата.
O1 A = 230 мм – заданная длина кривошипа.
![]() = 46 мм - длина кривошипа на чертеже.
= 46 мм - длина кривошипа на чертеже.
Вычисляем масштаб построения ![]() ;
;
 = 0,23 / 46 = 0,005 м/мм
= 0,23 / 46 = 0,005 м/мм
В соответствии с выбранным масштабом определяем длины всех линейных величин.
Вычисляем длину отрезка АВ: ![]() = 0,575 / 0,005 = 115 мм.
= 0,575 / 0,005 = 115 мм.
Вычисляем длину отрезка О2 В: ![]() = 0,92 / 0,005 = 184 мм.
= 0,92 / 0,005 = 184 мм.
Вычисляем длину отрезка АD: ![]() = 0,16 / 0,005 = 32 мм.
= 0,16 / 0,005 = 32 мм.
Строим план механизма в заданном положении (φ = 2250. ) Заданное положение механизма, вычерчиваем основными линиями. (Остальные положения механизма вычерчиваем тонкими сплошными линиями). Вычерчиваем начальное звено О1 А в заданном положении. Из точки A делаем засечку радиусом ![]() . Из точки О2 делаем засечку радиусом
. Из точки О2 делаем засечку радиусом ![]() . Находим место пересечения засечек – получаем положение точки B. Находим положение точки D.
. Находим место пересечения засечек – получаем положение точки B. Находим положение точки D.
Разбиваем окружность на восемь равных частей. Строим 8 положений механизма, чтобы представить себе как он работает и какую траекторию описывает точка D. Последовательно помещаем шарнир А в равноотстоящие положения 2, 3…7, 8 в направлении вращения кривошипа, методом засечек определяем соответствующие положения точек B и D кривошипа.
Для получения траектории точки D необходимо последовательно соединить плавной кривой все восемь положений точки D с помощью лекал. Находим крайние положения механизма (M1 N1 ТВ1 и M2 N2 ТВ2 ).