Курсовая работа: Математическая модель в пространстве состояний линейного стационарного объекта управления
2. Решение задачи быстродействия симплекс-методом
Дана система:
 (3)
(3)
1. Проверим управляемость данной системы.
Запишем систему ДУ в матричном виде:
![]() ,
,
где  .
.
Данная система является стационарной, её порядок ![]() , поэтому матрица управляемости имеет вид:
, поэтому матрица управляемости имеет вид:
![]()
Найдем матрицу управляемости:

Ранг матрицы управляемости равен порядку системы, следовательно, данная система является управляемой.
![]() следовательно
следовательно ![]() .
.
Собственные числа матрицы ![]() найдем из уравнения
найдем из уравнения ![]() :
:



Действительные части собственных значений матрицы ![]() являются неположительными, следовательно, все условия управляемости выполнены.
являются неположительными, следовательно, все условия управляемости выполнены.
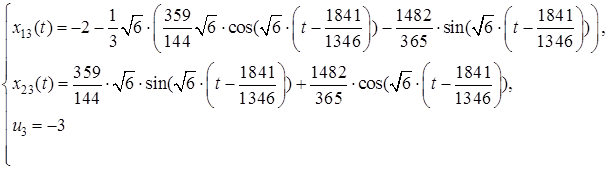
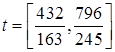
2. Ссылаясь на решение задачи быстродействия из ДЗ№2 по СУЛА «Решение задачи быстродействия» имеем:
Запишем зависимости ![]() ,
, ![]() , полученные при решении систем дифференциальных уравнений:
, полученные при решении систем дифференциальных уравнений:
 :
:
 :
:
 :
:
 :
:
Перейдем к дискретной модели заданной системы. Имеем