Курсовая работа: Механізм важіля
А 2
В Д
4
С
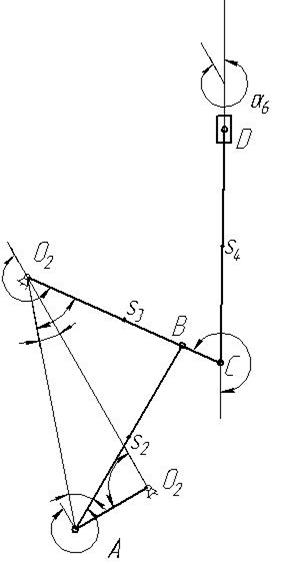
Рис 1.1.Механізм важіля
Механізм важіля складається з п’яти ланок, де ланка 1- вхідна і ланка 5- вихідна (повзун). Визначемо основні типи ланок, характер руху, клас і назву кінематичних пар. Результати заносимо в таблицю 1.
Таблиця 1. Характристика ланок і кінематичних пар.
| Ланки механізму | |||
| Позначення | Назва ланки | Характер руху | |
| 0 | Стійка, корпус, станина | Нерухомий | |
| 1 | Кривошип | Обертальний | |
| 2 | Шатун | Плоский | |
| 3 | Коромисло | Обетальний | |
| 4 | Шатун | Плоский | |
| 5 | Повзун | Поступальний | |
| Кількість рухомих ланок механізму n =5 | |||
| Кінематичні пари (КП) | |||
Позна- чення | Характер відносного руху ланок, що утворюють КП | Номера ланок, що утворюють КП | Клас пари |
| O1 | Обертальна | 0, 1 | 5 |
| А | Обертальна | 1, 2 | 5 |
| О2 | Обертальна | 0, 3 | 5 |
| В | Обертальна | 2, 3 | 5 |
| С | Обертальна | 3, 4 | 5 |
| Д | Обертальна | 4, 5 | 5 |
| Д1 | Поступальна | 0, 5 | 5 |
| Кількість КП 5-го класу р5 =7, 4-го класу р4 =0 | |||
Усі КП механізму – плоскі і дозволяють відносний рух ланок тільки в одній площині, тому весь механізм плоский.
Ступінь волі визначемо за формулою Чебишева:
W=3n-2p5 -p4 =3*5-2*7–0=1.
Групи Ассура (нульові групи)показані на рисунку 1.2 у порядку їх відокремлення.
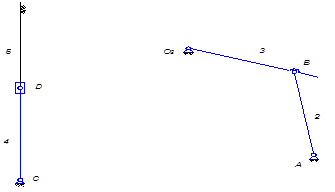
Рис. 1.2. Групи Ассура другого класу і другого порядку
Найвищій клас груп Ассура – другий, одже і увесь механізм другого класу.
2. СИНТЕЗ МЕХАНІЗМУ ВАЖІЛЯ
Для синтезу механізму задані такі дані: довжини ланок 1-4 -01 А=115мм, АВ=291мм, О2 В=232мм, О2 С=290мм, СД=319мм, О1 О2 =338мм, відстань L6 =271мм, а також кути крайніх положень ланки 3.
Треба визначити кут перекриття θ та коефіціент зміни середньої швидкостіk.
Так як відомі розміри усіх ланок, то можна побудувати два крайніх положення механізму. Знайдемо кут перекриття з трикутника 01 В1 В2 .

θ=6о 71′
Звідси знаходимо коефіціент зміни середньої швидкості:
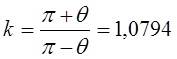
Креслення виконуємо з масштабним коефіціентом μ=0,004. Тобто
О1 А=lO 1 A /μ=0,115м/0,004=28,75мм
АВ=72,75мм
L6 =67,75мм
О2 С=72,5мм
О2 В=58мм
Н=72,5мм
3 ВИЗНАЧЕННЯ ФУНКЦІЙ ПОЛОЖЕННЯ
Зобразимо заданий механізм у вигляді замкнутого векторного многокутника. Визначимо допоміжні кути γі .
![]()