Курсовая работа: Проектирование системы оптимального корректирующего устройства
4.2 Определение автоколебаний в замкнутой системе
4.3 Отработка гармонических сигналов
ЗАКЛЮЧЕНИЕ
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
введение
В курсовой работе рассматривается замкнутая, одномерная, стационарная, непрерывная, следящая система с частично заданной структурой, то есть большинство ее элементов уже выбраны в соответствии с принятым принципом управления, функциональным назначением и условиями согласования с объектом управления. Система является нелинейной, однако анализ проводится как с учетом, так и без учета нелинейностей ее отдельных элементов.
При проектировании системы с частично заданной структурой основной проблемой является синтез линейной системы, т.е. определение параметров корректирующего устройства, обеспечивающего заданные требования к качеству регулирования.
В широком смысле выбор оптимального корректирующего устройства осуществляется на основе требований к массе, габаритным размерам, стоимости и других параметров, определяемых условиями эксплуатации. В более узком смысле, необходимо обеспечить качество системы в установившемся и в переходном режимах.
Для рассматриваемой системы, кроме обеспечения заданных требований, необходимо выполнить некоторые ограничения:
- ограничения на коэффициент усиления: его увеличение может неблагоприятно сказаться на возрастании влияния помех, что вызывает проблемы при конструировании и наладке системы;
- ограничения на положение высокочастотных асимптот логарифмической амплитудной характеристики: желательно иметь больший наклон асимптот;
- ограничения на порядок модели корректирующего устройства: не выше второго порядка;
- ограничения на величину частоты среза: ее уменьшение неблагоприятно сказывается на быстродействии системы.
1. СИНТЕЗ ЛИНЕЙНОЙ СИСТЕМЫ
1.1 Анализ исходной системы
Составим функциональную схему замкнутой системы. Система содержит последовательно включенные в прямой цепи: усилитель мощности (УМ) и объект управления (ОУ), в цепи обратной связи: датчик обратной связи (ДОС), связанный с ОУ при помощи кинематической связи (КС). Схема показана на рис. 1.1.
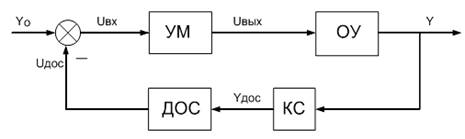
Рис. 1.1. Функциональная схема исходной системы
Составим структурную схему исходной системы. УМ предполагается безынерционным, но с ограниченной зоной линейности ![]() . В КС между ОУ и ДОС присутствует люфт (зазор) величиной 2∆. Схема изображена на рис. 1.2.
. В КС между ОУ и ДОС присутствует люфт (зазор) величиной 2∆. Схема изображена на рис. 1.2.
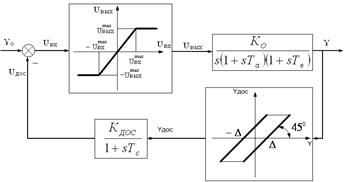
Рис. 1.2. Структурная схема исходной системы
Проведем линеаризацию исходной системы. Для этого необходимо пренебречь наличием нелинейных эффектов, то есть считать, что УМ имеет неограниченную зону нелинейности, зазор (люфт) в КС отсутствует, а коэффициент передачи равен единице.
Рассчитаем коэффициент УМ:
![]() .
.
В техническом задании (ТЗ) коэффициент передачи датчика угла ![]() имеет размерность В/град. Для согласования размерностей в системе необходимо привести
имеет размерность В/град. Для согласования размерностей в системе необходимо привести ![]() к размерности В/рад. Для этого введем коэффициент согласования
к размерности В/рад. Для этого введем коэффициент согласования ![]() град/рад:
град/рад:
![]() В/рад.
В/рад.
Структурная схема линеаризованной системы в общем виде изображена на рис. 1.3, с числовыми параметрами на рис. 1.4.
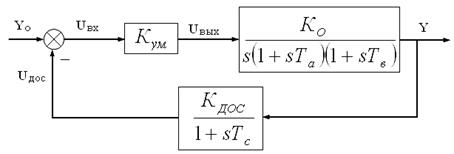
Рис. 1.3. Структурная схема линеаризованной системы в общем виде