Курсовая работа: Разработка аналоговой системы автоматического управления следящим электроприводом

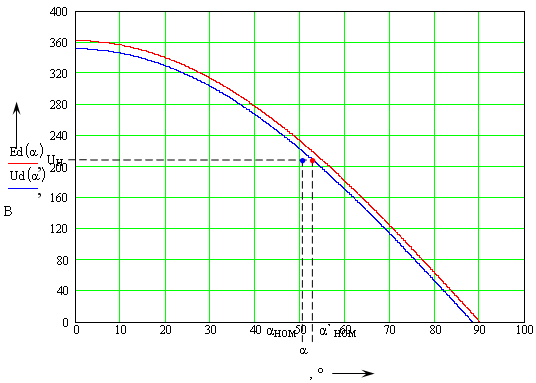
Результаты расчётов для построения статических характеристик представлены в таблице 1.3.
Таблица 1.3 - Результаты расчетов для построения статических характеристик
| α | 0° | 10° | 20° | 30° | 40° | 50° | 60 | 70° | 80° | 90° |
| Ed (α) | 361,80 | 356,30 | 339,98 | 313,33 | 277,15 | 232,56 | 180,90 | 123,74 | 62,83 | 0 |
| Ud (α) | 351,24 | 345,74 | 329,42 | 302,77 | 266,59 | 222,00 | 170,34 | 113,18 | 52,27 | - |
По значениям ![]() и
и ![]() найдём так называемый динамический запас по напряжению
найдём так называемый динамический запас по напряжению ![]() , необходимый для реализации жесткой характеристики при действии отрицательной обратной связи по скорости:
, необходимый для реализации жесткой характеристики при действии отрицательной обратной связи по скорости:
![]() .
.
Начальный (минимальный) угол регулирования можно определить графически или из уравнения:
 .
.
Графики статических характеристик приведены на рисунке 1.2
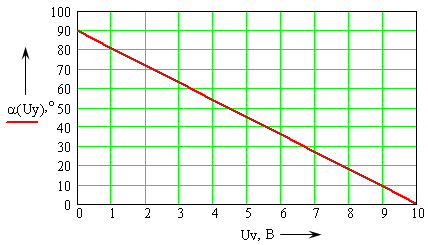
Характеристика “вход - выход” преобразователя EТП =Еd=f(UУ ) может быть построена при известной регулировочной характеристике системы управления тиристорами ![]() = f (UУ ), представленной на рисунке 1.3 и по регулировочной характеристике Ed= f (
= f (UУ ), представленной на рисунке 1.3 и по регулировочной характеристике Ed= f (![]() ), представленной на рисунке 1.2 путем последовательного перестроения.
), представленной на рисунке 1.2 путем последовательного перестроения.
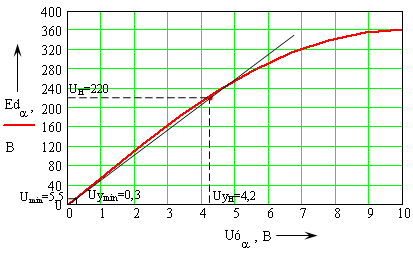
Общий вид зависимости EТП =Ed =f(UУ ) для соответствующей системы приведен на рисунке 1.4.
![]()
Значение ![]() определяем исходя из заданного диапазона регулирования:
определяем исходя из заданного диапазона регулирования:
![]() .
.
Ему соответствует угол регулирования ![]() и, соответственно,
и, соответственно, ![]() .
.
По полученной характеристике определяем коэффициент передачи преобразователя:
 .
.
1.5 Выбор и краткое описание комплектного тиристорного преобразователя
По результатам расчетов и построенной статической характеристике выбираем источник питания на базе КТП – нереверсивную трёхфазную тиристорную станцию управления двигателями типа ШУВ3501-12АУ4. Станция имеет мостовую силовую схему, рассчитана на номинальный выпрямленный ток до 50 А, номинальное выпрямленное напряжение до 230 В.
Структурная схема комплектного тиристорного преобразователя серии ШУВ3501-12АУ4 представлена на рисунке 1.5.
На рисунке 1.5 приняты следующие обозначения:
Р – токоограничительные реакторы; БЗРП – блок защиты сети от радиопомех; А1-А4 – автоматические выключатели; ТТ – трансформаторы тока; БЗП – блок защиты от перенапряжений; ВС – вентильная секция; ПР – предохранитель; БЗ – блок защиты; УДР – узел управления дистанционным расцепителем; ПДТ – панель датчика тока; СЗ – сеточная защита; ПНЗ – панель нулевой защиты; РУ – регулирующее устройство; БУПН – блок усилителя полупроводникового нереверсивного; БКТ – блок коррекции и токоограничения; ЛУ – логическое устройство; БЛ – блок логики; БКЛ – блок ключей; ДН – датчик напряжения; Ф – фильтр сетевого напряжения; БП – блок питания; БВ – блок возбуждения двигателя; В – вентилятор.
Станция управления состоит из регулируемого тиристорного выпрямителя, выполненного по мостовой трехфазной схеме, а также блоков управления и регулирования, обеспечивающих создание автоматизированного регулируемого электропривода постоянного тока.
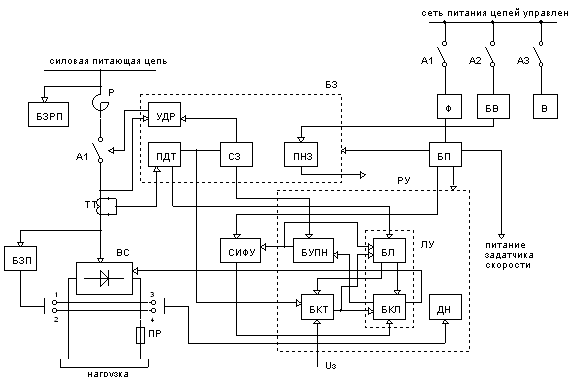
Рисунок 1.5 – Структурная схема комплектного тиристорного преобразователя серии ШУВ3501-12АУ4
Блок БЛ преобразует реверсивный сигнал ![]() в однополярный для управления нереверсивным усилителем.
в однополярный для управления нереверсивным усилителем.
Введение блокировки по выходному напряжению усилителя позволяет переключать импульсы только при нулевом напряжении усилителя, соответствующем ![]() , что исключает броски тока при реверсе и торможении привода. При смене полярности задающего напряжения
, что исключает броски тока при реверсе и торможении привода. При смене полярности задающего напряжения ![]() меняет знак, давая БЛ команду на переключение ключей, однако БЛ не изменяет своего состояния из-за наличия блокировок по току и напряжению усилителя. Начинается быстрый спад напряжения на выходе усилителя и тока в силовой цепи. При снижении напряжения и тока до нуля БЛ выдает команду на переключение ключей в БКЛ, при этом также меняется полярность управляющего сигнала на входе нереверсивного усилителя.
меняет знак, давая БЛ команду на переключение ключей, однако БЛ не изменяет своего состояния из-за наличия блокировок по току и напряжению усилителя. Начинается быстрый спад напряжения на выходе усилителя и тока в силовой цепи. При снижении напряжения и тока до нуля БЛ выдает команду на переключение ключей в БКЛ, при этом также меняется полярность управляющего сигнала на входе нереверсивного усилителя.
Реверс двигателя осуществляется переключением полярности питания в цепи якоря двигателя.
2. СТАТИЧЕСКИЕ РЕЖИМЫ РАБОТЫ САУ ЭП
2.1 Построение естественной электромеханической характеристики (при питании от сети), характеристики в разомкнутой системе (при питании от ТП)