Курсовая работа: Разработка аналоговой системы автоматического управления следящим электроприводом
Искусственная механическая характеристика при снижении величины потока до 0,5· k ФН приведена на рисунке 2.1.
Диапазон регулирования скорости в первой зоне (изменением напряжения)
 .
.
Диапазон регулирования скорости во второй зоне (изменением магнитного потока)
 .
.
Полный диапазон регулирования
![]() .
.
Жесткость механической характеристики при изменении напряжения
 .
.
Статизм характеристики определяется следующим образом:
![]() .
.
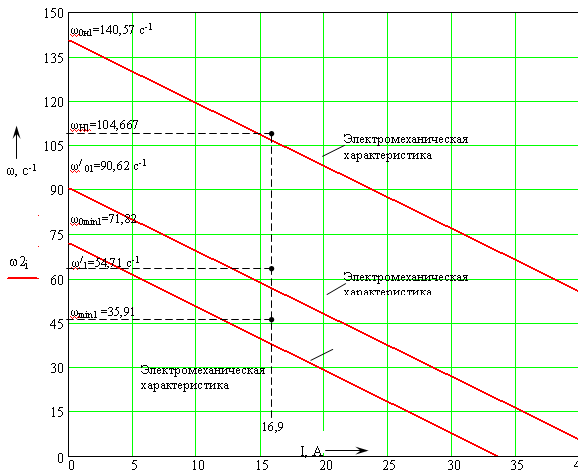
Построение электромеханических характеристик двигателя при питании от преобразователя в разомкнутой системе и при допущениях непрерывности тока вплоть до I=0 можно осуществить по формуле:
 .
.
Характеристики следует строить при углах управления αН (обеспечивает получение номинальной скорости ![]() Н при номинальном токе нагрузки), α=1,5 α H и α = α max (обеспечивает минимальную скорость при номинальной нагрузке).
Н при номинальном токе нагрузки), α=1,5 α H и α = α max (обеспечивает минимальную скорость при номинальной нагрузке).
Значение αН определим из следующей формулы:
 .
.
Задаваясь токами I , находят им соответствующие скорости и строят электромеханическую характеристику при α=αН .
Результаты расчётов для электромеханической характеристики при α=αН представлены в таблице 2.1.
Таблица 2.1 – Результаты расчётов для электромеханической характеристики при α=αН
| 1,5 | |||||||||
| I | 0 | IH | 2IH | 0 | IH | 2IH | 0 | IH | 2IH |
| 140,57 | 104,67 | 68,76 | 90,62 | 54,71 | 18,81 | 71,82 | 35,91 | 0 | |
Для построения характеристики при максимальном угле управления через точку (ω=0, I=2IН ) параллельно характеристике при α=1,5αн проводится прямая до пересечения с осью скорости.
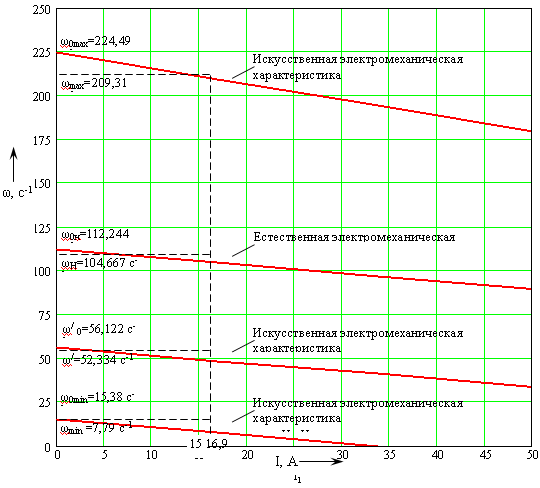
Электромеханические характеристики электродвигателя при питании от тиристорного преобразователя в разомкнутой системе регулирования представлены на рисунке 2.2.
Результат сравнения рисунков 2.1 и 2.2 следующий: качественные показатели характеристик при питании электродвигателя от тиристорного преобразователя в разомкнутой системе хуже, нежели при питании его от сети (жёсткость характеристик при питании электродвигателя от тиристорного преобразователя в разомкнутой системе ниже за счёт увеличения сопротивления якорной цепи). Максимальный угол регулирования:
 .
.
Жесткость характеристик можно определить по известному соотношению:
![]() .
.
Статизм определяется следующим образом:
 .
.
2.2 Построение электромеханической характеристики РЭП в замкнутой системе