Курсовая работа: Разработка и исследование системы автоматического регулирования температуры электропечи на базе промышленного регулятора Р-111
В электрических печах сопротивление осуществляется нагрев различных материалов до заданной температуры.
Во многих случаях после нагрева следует период выдержки, необходимый для выравнивания температуры в нагреваемых изделиях или для прохождения в цепях процессов, требующих времени. В связи с этим, основная задача устройств автоматического регулирования температуры состоит в обеспечении нагрева изделий до заданной температуры и в поддержании на заданном уровне с точностью, соответствующей требованиям технического процесса. Эти требования могут изменяться в широких пределах.
Различные электронные печи получили широкое распространение. Их существенные особенности:
· Возможность компенсации большого количества энергии в весьма малых объектах и получение высоких скоростей нагрева и любой необходимой температуры;
· Возможность обеспечения высокой равномерности нагрева изделий;
· Лёгкость регулирования подводимой мощности, а также, следовательно, температуры, лёгкость автоматизации регулирования температурного режима.
В настоящей курсовой работе осуществляется исследование системы автоматического регулирования температуры электропечи на базе промышленного регулятора Р-111.
1 КРАТКОЕ ОПИСАНИЕ ИССЛЕДУЕМОЙ САУ
Функциональная схема САП температуры нагрева металлического сердечника электропечи представлена на рисунке 1.1:

Рисунок 1.1 - Функциональная схема САП температуры нагрева металлического сердечника электропечи
Автоматическое регулирование температурного режима осуществляется системами управления с обратной связью, вырабатывающими управляющие воздействия в зависимости от величины знака отклонения регулируемой величины от заданного значения.
В качестве объекта исследования рассмотрим промышленную электрическую печь СУОП-015.20/12М-43 в системе автоматической стабилизации температуры, выполненной на базе высокочастотного регулятора температуры ВРТ-3.
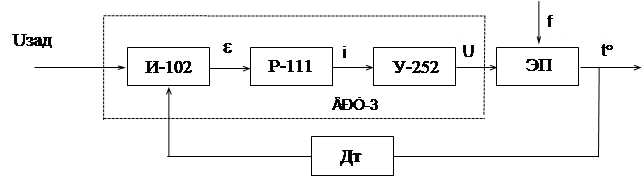
Система автоматической стабилизации температуры электропечи выполнена на промышленных приборах государственной системы промышленных приборов и средств автоматизации (ГСП) аналоговой электрической ветви. Ее структурная схема представлена на рисунке 1.2.
![]()
![]() Рисунок 1.2 – Структурная схема исследуемой САУ
Рисунок 1.2 – Структурная схема исследуемой САУ
Сигнал с датчика температуры Дт (термопара) поступает на вход. В блоке И-102 сигнал термопары компенсируется сигналом от встроенного задатчика и разница этих сигналов усиливается предварительным усилителем блока И-102.
Усиленный сигнал ошибки e поступает на вход регулирующего аналогового прибора Р-111, в котором могут быть сформированы П, ПИ, ПИД законы регулирования. Реализация типовых законов регулирования осуществляется на базе операционного усилителя с использованием RC-звеньев коррекции в цепи обратной связи. Р-111 имеет индикаторы, по которым можно контролировать величину разбаланса и выходной ток, органы динамической настройки, а также переключатель управления, позволяющий перейти на ручное управление объектом и обеспечивающий "безударное" переключение.
Усиленный сигнал, с выхода У-252, в виде напряжения подаётся в цепи нагрева электропечи.
2 ПОСТРОЕНИЕ МАТЕМАТИЧЕСКОЙ МОДЕЛИ ОБЪЕКТА УПРАВЛЕНИЯ
2.1 Методы математического описания объектов управления
Для построения высокоэффективной системы управления необходимо иметь описание объекта управления в виде математической модели. Для описания объектов управления, в которых отсутствует зависимость переменных состояния, управления от пространственных координат (линейные многомерные системы с сосредоточенными параметрами), используются системы линейных обыкновенных дифференциальных уравнений или соответствующие изображения по Лапласу. Рассмотрим многомерную линейную систему с m - управлениями, l - возмущениями и k - входами. Модель линейной системы с сосредоточенными параметрами во временной области:
![]() (2.1)
(2.1)
где х(t) – вектор состояния системы, ![]() ;
;
u(t) – вектор управлений (входов), ![]() ;
;
у(t) – вектор выходов, ![]() ;
;
f(t) – вектор возмущений, ![]() ;
;
А – матрица размерности nxn;
В – матрица размерности nxm;