Курсовая работа: Разработка и исследование системы автоматического регулирования температуры электропечи на базе промышленного регулятора Р-111
Тогда коэффициент усиления неизменяемой части K:
![]() (3.4)
(3.4)
Передаточная функция неизменяемой части прямой цепи будет иметь вид:
![]() (3.5)
(3.5)
Передаточную функцию синтезируемого регулятора найдём методом логарифмических частотных характеристик. По ЛАЧХ определяются w1, w2, а также Kж, по которым находится желаемая передаточная функция прямой цепи:
![]() (3.6)
(3.6)
где T1=1/w1, T2=1/w2, T3=1/w3, Kж – находится как пересечение прямой (до w1) желаемой ЛАЧХ с осью частот.
Передаточная функция регулятора:
![]() (3.7)
(3.7)
Полученная передаточная функция регулятора имеет очень сложную техническую реализацию и на практике такой регулятор не применяется. Практически реализуемые регуляторы строятся с использованием следующих допущений и приближений: объект управления достаточно инерционен и в цепях регулятора нет высокочастотных помех или они достаточно малы, то высокочастотной частью регулятора можно пренебречь и считать, что T3=0. Если потребовать чтобы T1=T2, тогда желаемая передаточная функция будет иметь вид:
![]() (3.8)
(3.8)
В этом случае для объекта второго порядка будет получен ПИД-регулятор.
3.2 Определение параметров ПИД-регулятора
Так как требования к высокочастотной части не высоки, то считаем что T3=0 и T1=T2, тогда получаем, что желаемая ЛАЧХ имеет вид приведенный выше и передаточная функция регулятора будет иметь вид:
 (3.9)
(3.9)
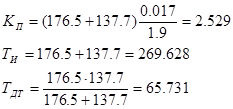
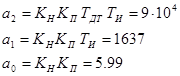
Как видно в этом случае получаем ПИД-регулятор со следующими параметрами:
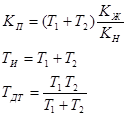 (3.10)
(3.10)
3.3 Построение переходной характеристики замкнутой системы
Передаточная функция прямой цепи:
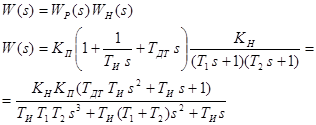 (3.11)
(3.11)
Передаточная функция замкнутой системы:
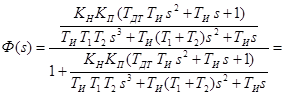
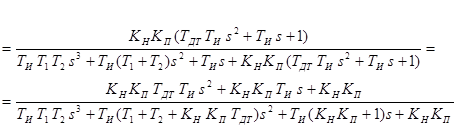 (3.12)
(3.12)
или введя обозначения:
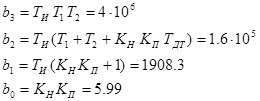 (3.13)
(3.13)
Получили передаточную функцию замкнутой системы в виде отношения двух полиномов:
![]() (3.14)
(3.14)
Для желаемой передаточной функции прямой цепи будем иметь следующую замкнутую систему: